Physics
Day 1 (1.1-1.5/2.1-2.3)
The Professor’s office hours are TBD at this point in time, in classroom 290C
There are 2 Term exams and 1 cumulative Semester Exam for the course. Each Exam worth 15% of the total grade. The first test is scheduled for September 26, 8-9:30 PM Room TBD. The second test is scheduled for November 14, 8-9:30 PM Room TBD. One thing to note is that the Wednesday Lecture before each of the tests has been canceled to accommodate for the Exams. The regularly scheduled class time will then because office hours.
There are also Supplemental Instruction Sessions ran by the undergraduate student Tina Schroedel on Monday and Thursday at 7:30-8:20 PM in classroom WALC 3138. She will also have office hours but that is TBD.
The fundamental definition of Physics is an experimental science encompassing subjects such as motion, waves, light, electricity, magnetism, atoms, and nuclei. Physicists search for general rules, or laws, that bring understanding to the chaotic behavior of our surrounding.
In Physics the word “Law” means a casual mathematical relation between variables inferred through some reasoning process.
Measurement and Physical Quantities
There are 2 main types of measurements Vectors and Scalars, there are different types of each measurement;
Velocity Vectors: These are measurements that have both Direction and Amount. This relates to the motion of an object.
Displacement Vectors: These measurements are also measured in Direction and Amount. This however relates to the change in the position of the object.
Mass Scalars: This measurement is only Amount. It refers to how much an object weighs.
SI Units
Meters (m)
Seconds (s)
Kilograms (Kg)
Mole (mol)
Physics also uses Scientific Notation to display the values used in the calculations. Try to convey the variables to four significant figures.
Kinematics
Specifically Motion in 1 direction/dimension. Each object will be represented by a Point-like Particle, the represents the center of mass of the object. This allows the Physicists to simplify the process of solving the equation. As we are eliminating the variables that are unnecessary to solving the particular problem. For this same reason, we also use models as displaying the problem in a manageable way will make it much easier to find the solution, than trying to manipulate the larger variables to determine a solution. Estimation is also important because some of the solutions can have infinite significant figures, so rounding will allow for an acceptable estimate of the variable.
The Reference Frame is an Umbrella term for 2 variables:
Reference Time
Reference Position
There are instances where there is a change in a value such as velocity. This can be displayed through the use of a Delta (Δ) symbol. Example:
Δv = v2 - v1
One thing to note is that when writing values that are vectors in one dimension it is important to include the direction of the vector as an arrow denoted above the variable. Each vector has a tail (the point where it originates) and a head (the tip of the arrow).
Day 2 (2.4-2.9)
It is important to distinguish between time and time interval because in Physics this mean two different things. Time refers to a reading on a clock or some other time-measuring instrument. On the other hand, time interval is the difference between 2 times or Δt for equations.
Velocity can either be Uniform Velocity or Non-uniform Velocity:
Uniform Velocity: This is the type of Velocity that does not change, so therefore is consistent throughout the reference frame.
Non-uniform Velocity: This is the type of Velocity that does change throughout the reference frame. It can either increase or decrease. It could also first increase and then decrease, it is anything that is not consistent throughout the reference frame.
In Physics graphs are used to help visualize the sets of data point collected from the experimental setups. One of the most common types of graph in Kinematics is the Position-versus-time graph. This is because on this graph the slope is the velocity. This can be the easiest way to find the instantaneous velocity.
Sometimes you will have to find the average velocity throughout the reference frame. This is done by dividing the change in displacement by the change in time (Δx/Δt).
When looking at distance traveled there are two ways of thinking about it. The first is by looking at the distance traveled as the Net Displacement, the other is to look at the total distance traveled as the path length.
Net Displacement: This is the sum of the components in the reference frame (—→ + ← + ——→ = ———→
Path Length: This purely the sum of the magnitudes of the components, and disregards the direction of the travel (—→ + → + ——→ = ————→)
Acceleration
Acceleration is the rate of change to the velocity that an object is traveling. Average acceleration can be found be dividing the changing in velocity over the change in time (Δv/Δt).
Instantaneous Velocity: This refers to the velocity of an object during a given instant.
Another type of graph is the Velocity-versus-time graph because the slope on this graph will instead be the acceleration.
Although it might seem counter-intuitive any object dropped at the same height regardless of weight will make contact with the ground at the exact same time. Even though this may seem untrue thanks to objects like feathers which fall much slower than an object like a bowling ball. This difference can be attributed to air-resistance, as the feather is much more susceptible to this than the bowling ball is.
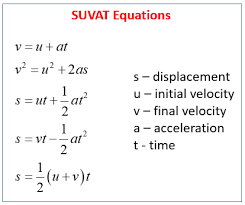
For all things acceleration and projectile motion and so forth remember the SUVAT equations.
Projectile Motion
This is motion in 2 directions, generally looked as through vertical and horizontal properties. The vertical and horizontal components are completely independent of each other. For negligible air resistance, a projectile follows a parabolic path by traveling with uniform horizontal and non-uniform vertical motion (accelerating vertically, but constant in the horizontal).
An important formula for projectile motion is the range formula:
Range (R) = (v₀² * sin(2θ)) / g
A free body diagram is a diagram that shows all of the forces currently acting on an object. The net force on a system resulting from multiple interactions with its environment calculated as the vector sum of all acting forces.

Newtons Laws
First Law (Law of Inertia): An object at rest stays at rest, and an object in motion stays in motion with the same speed and in the same direction unless acted upon by a net external force.
Second Law (Law of Acceleration): The acceleration of an object is directly proportional to the net force acting on it and inversely proportional to its mass. (F = ma)
Third Law (Action and Reaction): For every action, there is an equal and opposite reaction.
A Newton (N) is measured in Kgms-2 and is the unit of measurement for force.
Vectors in 2 directions, if the direction is at a degree to the horizontal, use basic Trig to solve the individual vertical and horizontal components. If an object is not moving the Net force on the object is 0.
There are 2 types of friction, static and kinetic. Friction is denoted by the coefficient (μ). Once an object starts moving static friction converts into Kinetic Friction. However, in the conversion, static friction is always higher than kinetic friction because of the law of inertia.
Static Friction: This is the type of friction that prevents sliding from beginning.
Kinetic Friction: This is the type of friction that works against sliding.
One surprising example of static friction is tires, this is because the part of the tire that is in contact with the ground is not moving/sliding.
If an object hangs motionless by two ropes that are angled differently with the ceiling, the horizontal force components of rope 1 and rope 2 are equal in magnitude, but opposite in direction.
FK (Kinetic Friction Force) = μFN (Net Force): This is the formula to calculate friction force.
Circular Motion
An object in uniform circular motion travels at a constant speed, but continually changing velocity direction due to radial acceleration
V = (2πr)/T = 2πrf
f = 1/T
The direction of the change rate resulting from the radial acceleration depends on the speed and radius of the uniform circular motion.
aR = v2/r = (4π2r)/T2
Radial acceleration results from a centripetal net force that acts on an object perpendicular to its motion towards the circle’s center. An object inside a non-inertial frame in circular motion is seemingly pushed by fictitious forces. However, the motion is due to its inertia.
Objects in freefall perceive themselves as weightless because they are unable to act against the force of gravity that pulls them. Planets or satellites are in freefall, like a sky diver. But, their “falling” is maintained by orbital motion
Kepler’s Laws
Planetary orbits are ellipses with the sun at a foci
Planets sweep out equal arms in equal time
Orbital period related to the orbit’s semi-major axis
T2/r3 = Constant
The universal law of gravitation models the attraction between the objects with mass as a force between idealized point particles.
F = G(m1m2)/r2
A system of moving objects has a total linear momentum equal to the vector sum of the individual linear momenta
Momentum: p = mv
Each force that acts during a time interval imparts impulse to an object, and their net impulse causes momentum to change
Impulse: I = FΔt
A system of one or more objects has an amount of energy due to their motion, interactions and internal composition
The Kinetic energy is due to motion
The internal energy is due to temperature and atomic structure
The Gravitational Potential Energy is due to earth-object separation
The Elastic Potential is due to spring deformation
Esys = K + Ug + Us + Uint
External forces applied to a system do work that change the system’s energy, as described by the work - energy equation
Ei + W (ΔE) = Ef
A constant force does work on an object depending on the relative direction between the force and the object’s motion
W = Fdcosθ
Energy is a conserved quantity
Gravitational potential energy is stored in an object-earth system when an object is above “ground” level