Torque and Rotational Equilibrium in Physics
Overview of Torque and Rotational Equilibrium
Torque is a measure of the rotational force acting on an object, defined as the product of the force and the perpendicular distance from the axis of rotation (lever arm).
Rotational equilibrium occurs when the sum of all torques acting on an object equals zero, similar to how translational equilibrium requires the sum of forces to equal zero.
Key Concepts
Conditions for Equilibrium:
Translational Equilibrium: The sum of forces equals zero (ΣF = 0).
Rotational Equilibrium: The sum of torques equals zero (Στ = 0).
Free Body Diagrams: To analyze forces and torques acting on an object.
Important to clearly represent all forces, including weights, normal forces, and flexing points in a rotational scenario.
Torque Definition
Formula:
Torque (τ) = Force (F) × Lever Arm (r)
Key Point: The force must be perpendicular to the lever arm to maximize torque.
Application of Rotational Equilibrium
Example with a Seesaw:
Problem Statement: What must be the weight of a child on one side of a seesaw for it to be in equilibrium if another child with a mass of 30 kg is 2 m away from the fulcrum?
Free Body Diagram: Shows forces acting on the seesaw (weights of both children and the seesaw).
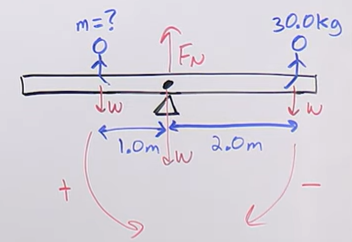
Setting Up Equations:
Positive torque from the unknown mass (left side) and negative torque from the known mass (30 kg on right side).
Left side( mass unknown x gravity x 1 m) = Right side (30 kg x gravity x 2 m)
Gravity can be canceled out
So Left side (unknown mass x 1 )= Right side (60 kg)
So the unknown mass =60/1 =60kg
Example with a Platform Suspended:
Problem Statement: A 6.0 m long platform with a uniform mass of 10 kg is suspended with weights adding to rotary forces.
Use a free body diagram to identify forces and their lever arms connected through tension.
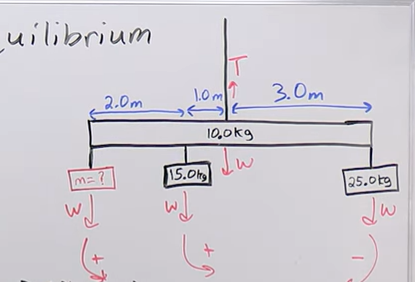
Calculate unknown weights and tensions as a combined influence:
Sum of torques must equate to zero based on the distances from the pivot (hinge).
Στ = τclockwise - τcounterclockwise = 0
Determine the unknown by isolating it in the torque equation to find it correctly.
Unknown Weight (W) = (Known Weight × Distance from Pivot)/ (Distance of Unknown to Pivot)
M= (15×1-25×3)/3
M=20kg
The total mass in the downwards direction is thus 70kg.
F=m x g so the sum of the downwards torques is F = 70kg × 9.81m/s² = 686.7N.
The upwards torque thus must equal 686.7
Two-Dimensional Equilibrium Problems:
Considerations: Multiple forces and components acting on a system (off-axis forces).
Resolve forces into components for both X and Y directions in a free body diagram.
Use the following equations for equilibrium:
ΣFx = 0
ΣFy = 0
Στ = 0 (Choose appropriate axis’)
Specific Example of a Boom (something hooked up to a wall and a string):
Analyze a boom with attached weights and a cable at an angle; use trigonometry to resolve cable tension into components.
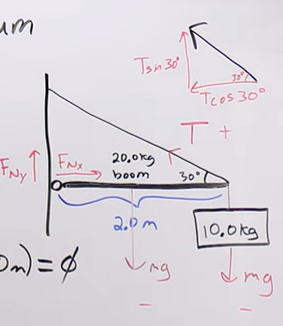
Equation structure:
For example, (T sin(30°) x 2 m )- (weight of the boom 20kg x gravity x distance to center 2 m ) to find T.
T=392Nm
Provide component breakdowns for analysis as the forces can generate tangential and perpendicular effects on the support points.
Tips for Solving Problems
Always start with a free body diagram to visualize forces and their directions.
Choose your axis of rotation based on what makes the math simplest or allows you to eliminate unknowns (lever arms of zero).
When forces have gravity, don’t drop it from equations; account for it in every term unless it's manageable (in equilibrium context).
When working with angles, resolve forces into their components and maintain consistency (e.g., trigonometric ratios for angles).