GEOM 5(Jan 27th)
Typed
Projections
Definition: A map map projection is the systematic transformation of locations on the earth (latitude/longitude) to planar coordinates
When creating a map projection, cartographers must consider the purpose of the map, as different projections can distort various aspects such as area, shape, distance, or direction.
Some of these can be distorted:
Area: Some projections maintain area relationships, while others do not, leading to misrepresentations of size.
Shape: Projections may preserve the shapes of landmasses but distort their size or orientation.
Distance: Certain projections can accurately represent distances between points, while others may exaggerate or minimize them.
Direction: Some projections maintain true directions, while others may alter them, affecting navigation and route planning.
Perspective: The choice of projection can influence the viewer's perception of the world, potentially shaping political and cultural viewpoints.
Universal Transverse Mercator (UTM)
The map is broken down into 60 different UTM zones with a central Meridian
Eah zone is represented by 60 degrees of longitude
One of the most widely used map projection for Remote Sensing in topographic mapping is the UTM
Each zone is 6 degrees wide, allowing for accurate representation of the Earth's surface within that range, which minimizes distortion in distance, area, and shape.

The origin is 0 degrees N at the equator and 500,000m east of the false western boundary of the zone; the false easting means that there are no -ve values in the carteason system
Similarly in the southern hemisphere zones, the equator is given a false northing of 10,000,000
A point that has an easting of 400,000 meters is about 100,000m west of the central meridian
False Northing:
start at 10,000,000m the subtract the distance to the point's latitude in meters to determine the actual northing value.
This system is particularly useful for large-scale mapping and provides a standardized framework for spatial data analysis across different regions. as well it is universal and can work anywhere in the world except north and south poles.
GNSS & GPS
“Global Navigation Satellite Systems (GNSS) include constellations of Earth-orbiting satellites that broadcast their locations in space and time, of networks of ground control stations, and of receivers that calculate ground positions by trilateration”
Trilateriatio’s is term which indicated that 3-4 satellites are in use

What is GPS
A very precise positioning system
A developed and maintained by the US department of Defence
Satellite based
24 satellites
20,200 km into orbit above the Earth's surface
GPS Segments
Space segment
Control segment
global network of ground facilities that track and monitor GPS satellites and help with other key aspects of their functioning
User Segment
GPS Receiver
User Segment: GPS Receiver - A device that receives signals from GPS satellites to determine its location, speed, and time.
How it works
Uses measurements form 4 + Satellites
A Signal it sent to the satalites to tel them where they are in their orbit
The stalites then recive this information
The stalites then send a signal to the reciver
using speed the reciver can detrmeine the distance from the orbiting stalites and calculate its own position based on the timing of the received signals.
This distance travel time x speed of light
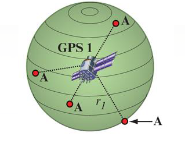
Suppose the distance from Satellite 1 to our position (A) is r1
At this point we could be located anywhere on the specified sphere of radius=r1
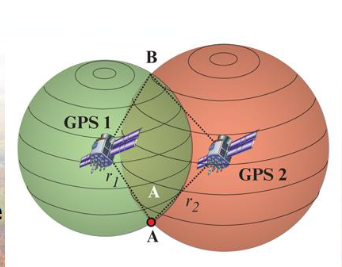
Next, let us take another measurement from a second satellite, Satellite 2
Now our position is narrowed down to the intersection of these two sphere
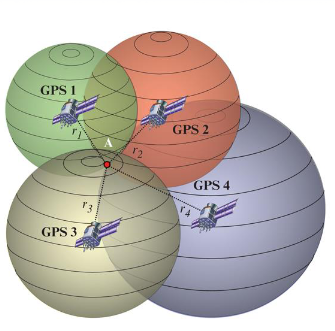
Taking another measurement from a 3rd satellite narrows our position down even further, to the two points
These points are located where the 3rd sphere cuts through the intersection of first two spheres
So by ranging from 3 satellites we can narrow our position to just two points in space

We can eliminate one of the two points as one point may be too far from the earth OR
We could make a 4th measurement from another satellite to determine the true point
However, GPS receivers use a 4th satellite to precisely locate our position
Trilateration done by computation of signal travel time to receiver in order to get distance from speed of light (~300,000 km/s).
Sources of Error
Multipath: Multipath occurs when the GPS satellite signal bounces off of nearby structures like buildings and mountains. This interference will affect the timing of the signals, which then leads to how the receiver reads distance
Atmosphere Refraction:
The troposphere and ionosphere (zones within the atmosphere) can change the speed of propagation of a GPS signal.
GDOP/PDOP (Geometric/Position Dilution of Precision):
If the satellites are spread apart in the sky, then the GPS receiver has a good GDOP.
GDOP and PDOP are measures that indicate the quality of the satellite geometry in relation to the GPS receiver. Lower values imply better accuracy in position estimation, while higher values suggest potential errors in the calculated location.

Correction of Errors
A map projection is the systematic transformation of locations on the earth to planar coordinates. It involves considerations of area, shape, distance, direction, and perspective, which may be distorted differently in various projections. The Universal Transverse Mercator (UTM) is a widely used projection that divides the world into 60 zones, minimizing distortion for large-scale mapping.
Global Navigation Satellite Systems (GNSS) are networks of satellites and ground stations used for precise positioning, with GPS being a specific implementation developed by the US Department of Defense. GPS utilizes trilateration to calculate positions based on signals from at least four satellites.
Sources of error in GPS include multipath effects, atmospheric refraction, and geometric dilution of precision (GDOP/PDOP). Differential GPS (DGPS) enhances accuracy by using base and rover receivers to correct and improve positioning. DGPS provides increased precision, real-time usage, and is used in applications such as marine navigation, aviation, and land surveying.
KAi
Understanding Projections
Projections are methods used to represent the three-dimensional surface of the Earth in two dimensions. This conversion from a 3D globe format to a 2D plane can lead to the distortion of geographical elements such as shape, size, direction, and angle. These distortions occur due to the complex nature of projecting a curved surface onto a flat one, making it essential to select a projection that best suits the geographical and navigational needs for specific tasks.
Types of Projections
Universal Transverse Mercator (UTM): A well-known projection system that is universally applicable but does have limitations at extreme latitudes. It maintains angles and is suitable for navigation as it aids in direct point-to-point travel.
Conformal Projections: These projections preserve shape and are particularly effective for regions with a west-east extent—like Canada—where a conformal projection accurately reflects areas.
Features and Distortions of Projections
When applying a projection, practitioners must be aware of the trade-offs. For instance, while some projections might accurately preserve area, they may do so at the cost of accuracy in shape or angle. Therefore, each projection's inherent characteristics must inform its practical use:
Area: Some projections maintain the proportional size of landmasses, while others do not.
Shape: Projections like the conformal projection maintain the shapes of small areas accurately but may distort global relationships.
Direction: Certain projections excel in preserving angles and bearings, crucial for navigation, albeit potentially distorting distances and sizes.
Global Navigation Satellite System (GNSS)
The Global Navigation Satellite System (GNSS) comprises a constellation of satellites that orbit the Earth, providing positioning, navigation, and timing services to users with satellites broadcasting their location and time to receiving devices.
Core Components of GNSS
Satellites: These orbiting satellites serve as the foundation of GNSS, calculating distant positions based on signal travel time.
Ground Control Stations: Key to managing satellite operations, these stations monitor the satellites, ensuring they operate effectively and correcting any positional errors.
Receivers: These devices, often handheld for personal navigation, calculate geographical positions using trilateration—the process of determining one's location based on the distances from three or more satellites.
Trilateration Defined
Trilateration is the principle that allows receivers to pinpoint their exact location on Earth. It works by:
Receiving signals from multiple satellites.
Calculating distances based on the time it takes for signals to travel from each satellite to the receiver.
Intersecting spheres generated by the distances from the satellites to identify the precise position.
Error Management in GNSS
Various factors can introduce errors into satellite positioning systems, including:
Multipath Errors: When signals reflect off buildings or obstacles, they take longer to reach the receiver, introducing inaccuracies.
Geometric Dilution of Precision (GDOP): This risk arises when satellites providing signals are not evenly distributed in the sky, leading to increased positional uncertainty.
Application of Control Stations: Control stations correct for errors based on known satellite coordinates, thereby increasing positional accuracy before displaying coordinates to the user.
Conclusion
Understanding projections and global navigation systems is essential for effectively working with spatial data and geographical analysis. The right projection can enhance spatial analysis, while GNSS technology supports accurate navigation and location services integrated with error-correction methodologies, improving user experience and precision in various applications.