integration
National School of Autonomous Systems
Analysis II First year
2023/2024
Chapter2:Integration
Riemann Integral
Definition. Let a and b be two real numbers such that a < B
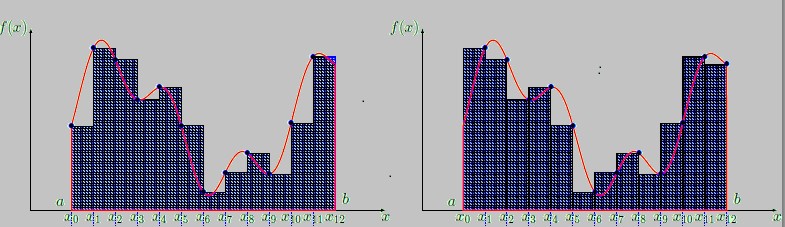
•subdivision: A subdivision of the closed bounded interval [a,b] is a finite family of real numbers
(x0,x1,...,xn) such that a = x0 < x1 < ... < b = xn. • The step of such a subdivision is the number
σ = max |xk − xk−1|
1≤k≤n
In other words, it is the length of the largest interval in the subdivision of [a,b].”

• The equidistributed: subdivision arises from a equidistant partitioning of [a,b] into n intervals of equal length . The points of the subdivision are given by
. The points of the subdivision are given by (They are distributed according to an arithmetic progression with a common difference σ).
(They are distributed according to an arithmetic progression with a common difference σ).
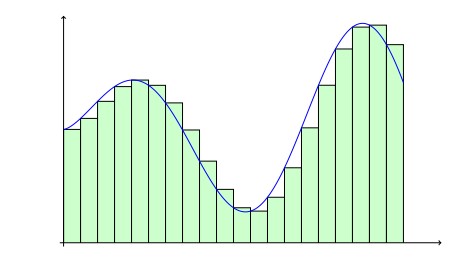
Definition (Riemann Sum) Let f be a function defined on [a,b], σ = (x0,...,xn) a subdivision of [a,b], and ∆ = (δ1,...,δn) a set of real numbers such that for all k ∈ {1,...,n}, δk ∈ [xk−1,xk] (we say that the set ∆ is adapted to the subdivision σ).
The Riemann sum of the function f associated with σ and ∆ is the number
n
S(f,σ,∆) = X(xk − xx−1)f(δk).
k=1
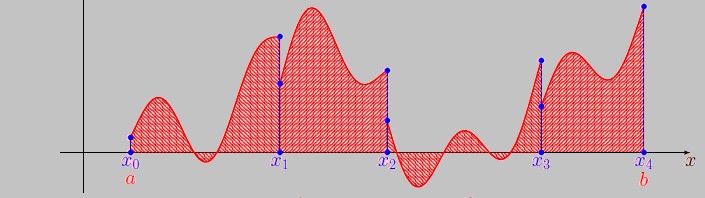
This number represents the area of the union of rectangles with bases [xk−1,xk] and heights f(δk).
Example. Consider an equidistributed subdivision with
The corresponding Riemann sums are written as

Definition. (Riemann Integral) Let f : [a,b] → R be a bounded function. If there exists a real number l such that for every ε > 0, there exists α > 0 such that for every subdivision σ with steps < α for any subdivision adapted to σ, we have
|S(f,σ,∆) − l| < ε
we say that the function f is integrable (in the sense of Riemann) over [a,b] and the number l is the
integral of f over [a,b]. This number is denoted .
.
In other words, a function is integrable if and only if all its sequences of Riemann sums whose subdivision steps tend towards 0, are convergent with the same finite limit.
Remark.
- The variable used in the integral notation is called dummy

Z b
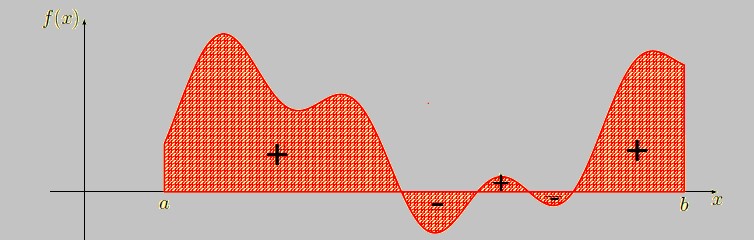
- The number f represents the algebraic area between the curve f and the x-axis, counting
a
negatively the parts below the axis and positively the parts above.
Theorem.
Let
f
beacontinuousfunctionontheinterval[
a,b
]
.Weperformasubdivisionof
[
a,b
]
witha
constantstepsize
h
(
h
=
b
−
a
n
.Let
)
k
∈
[0
,n
−
1]
,wedefine
x
k
=
a
+
k
b
−
a
n
=
a
+
kh
and
R
n
=
b
−
a
n
n
−
1
X
k
=0
f
(
x
k
)
,I
=
Z
b
a
f
(
x
)
dx
Wehavetheestimation
|
I
−
R
n
|≤
M
(
b
−
a
)
2
2
n
,M>
0
Thus,
lim
n
→∞
R
n
=
I
For the interval [0,1], we have
Proposition. Let f be a continuous function on [0,1], we define the sequences
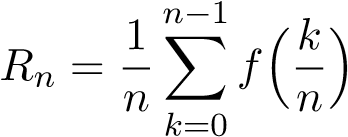 and
and
We have

Definition. We say that a function f : [a,b] → R is piecewise continuous on the interval [a,b] if there exists a partition (xi) (a = x0 < x1 < ... < xn = b) of [a,b] such that for every i ∈ {0,...,n − 1}, the restriction of f to ]xi,xi+1[ is continuous and has finite limits at xi and xi+1 (meaning the restriction of f can be continuously extended over [xi,xi+1]).
Such a partition is called adapted to the piecewise continuous function f.
Proposition.
- Any continuous function on [a,b] is integrable on [a,b].
- More generally, any piecewise continuous function on [a,b] is integrable. Let x1,x2,...,xn be its points of discontinuity, denote f˜k the extension of f at these points, then
Properties Let f,g : [a,b] be two integrable functions and α,β ∈ R, we have
Z Z Z
i) baf(x)dx = − abf(x)dx and aaf(x)dx = 0.
Z Z Z ii) abf(x)dx = acf(x)dx + cbf(x)dx for all c ∈ [a,b].
Z Z Z
- ab(αf + βg)(x)dx = α abf(x)dx + β abg(x)dx.
 Z b
Z b
- If f(x) ≥ 0 on [a,b] then f(x)dx ≥ 0. and f ≥ g on [a,b],then
a v)  .
.
- If f is even on [−a,a] then
- If f is odd on [−a,a] then
 .
.
- If f is even on [−a,a] then
Example.
We want to compute  using Riemann integral i.e
using Riemann integral i.e

in the following cases
- Let f(x) = λ (constant function), we have
 ) ( area of a rectangle).
) ( area of a rectangle).
- f(x) = x, we have
 .
.
- f(x) = ex, we have
 .
.
We can also use Riemann integral to compute some sum of numerical series.
Example. Calculate the limits of the following sequences
We write
thus, we only need to take f(x) = x which is continuous on [0,1]. We have
 .
.
Similarly for the sequence (vn), we have
We take the function f(x) = cosx which is continuous on the interval [0, ], thus
], thus

Primitive and Integral of a Continuous Function
Definition.
- If f is a continuous function on I, a primitive of f is any differentiable function on I into R whose derivative is equal to f.
- If F is a primitive of f (f a continuous function), meaning F0 = f, then the primitives of f on I are functions F + λ, λ ∈ R.
Theorem.
Suppose
f
isacontinuousfunctionon
I
into
R
and
a,b
∈
I
.If
F
isaprimitiveof
f
on
I
,then
Z
b
a
f
(
x
)
dx
=
F
(
b
)
−
F
(
a
)
.
Corollary.
If
f
∈C
1
(
I
)
and
x,a
∈
I
,then
Integration by Parts
Theorem.
If
u
and
v
aretwo
C
1
functionson[
a,b
]
,wehave
Z
b
a
u
(
x
)
v
0
(
x
)
dx
=
u
(
x
)
v
(
x
)
b
a
−
Z
b
a
u
0
(
x
)
v
(
x
)
dx
Proof. If u,v ∈ C1([a,b]), then uv ∈ C1([a,b]) and we have

On the other hand, we have

Hence the result.
Remark. In the case of an indefinite integral, integration by parts is written as
Z Z
u(x)v0(x)dx = u(x)v(x) − u0(x)v(x)dx.
Example. We want to compute, by integration by parts, the following integrals
Z Z Z
I1 = arctan(x)dx; I2 = arccos2(x)dx; I3 = sin(2x)ln(tan(x))dx
1-For I1, we set
I1 becomes

2-We set
I2 becomes 
We apply integration by parts again, setting
Then we have
I2 = xarccos2(x) − p1 − x2 arccos(x) − x + C, C ∈ R.
For I3, we set

Then we have

Example. Let In be the Wallis integral, given by
By setting

we get

which gives us the relation
In = (n − 1)In−2 − (n − 1)In
Thus, we have the following recurrence relation
Similarly, we have
 .
.
- For n = 2p, we have


- For n = 2p + 1, we have

where
 and
and
thus
 and
and
Change of Variable
Proposition.
Let
f
beacontinuousfunctionfrom
I
to
R
and
φ
a
C
1
functionfrom
J
to
I
.If
α,β
∈
J
,then
Z
φ
(
β
)
φ
(
α
)
f
(
x
)
dx
=
Z
β
α
f
(
φ
(
t
))
φ
0
(
t
)
dt
By definition, the transformation x = φ(t) (t ∈ J) is called a change of variable.
Proof. f is a continuous function on I, thus it has a primitive F, and we have

Since the function F ◦ φ is a C1 function (composed of two C1 functions), we have

Example. Calculate the following integrals

- For I1, we let t = x2, then dt = 2xdx, thus
 .
.
- For the integral I2, we let t = cosx, then dt = −sin(x)dx and
 We obtain
We obtain
 .
.
Primitive of a Rational Fraction
1- Rational fraction of the first kind: Let (a,b) ∈ R? × R and k ∈ N?, a rational fraction of the first kind is any fraction of the form
Its integral is given by

2-Second species rational fraction: Let (a,b,c) ∈ R∗ × R2 and k ∈ N∗, we call a second species rational fraction any fraction of the form

with ∆ = b2 − 4ac < 0.
To integrate this fraction, we first write the numerator as a function of the derivative of ax2 +bx+c, we have So 
Let
 and
and
For the calculation of the integral Ik, it’s direct, we have

For Jk, we write ax2 + bx + c in its canonical form, we have
 with
with .
.
We make the change of variable is written as
is written as
If k = 1, we have

If k ≥ 1, we will find a recurrence formula between Jk and Jk+1, using integration by parts. Example. We want to calculate the integral
here we have ∆ < 0, it’s a second species rational fraction. We write

Let , we write
, we write

Let , we obtain
, we obtain
To calculate this integral, we will integrate by parts the function  , by setting
, by setting
So

Finally, we have

The integral I is given by
 .
.
3. Any rational fraction: Let P and Q be two polynomials, we define the rational fraction
The aim here is to write F in the form of the sum of rational fractions of the first and second species, in order to be able to integrate it. For that, we have the following steps
- Step 1: Simplify F (look for common elements between P and Q).
- Step 2: If degP ≥ degQ, we perform the Euclidean division. We write
 such that degR < degQ
such that degR < degQ
- Step 3: Factorize the denominator, for example, we have
Q(x) = (x − a1)(x − a2)2 + (x − x3)3(α1x2 + β1x + γ1)(α2x2 + β2x + γ2)2
such that  0 and
0 and
- Step 4: Decompose the fraction
 into simple elements, we have
into simple elements, we have

Example. Calculate the following integrals

1- We will first decompose the rational fraction into simple elements. The fraction is already simplified and the degree of the numerator is strictly less than the degree of the numerator, so we go directly to step 3. We have x3 − 7x + 6 = (x − 1)(x − 2)(x + 3), then
into simple elements. The fraction is already simplified and the degree of the numerator is strictly less than the degree of the numerator, so we go directly to step 3. We have x3 − 7x + 6 = (x − 1)(x − 2)(x + 3), then

a,b,c ∈ R constants to be determined. We can do it by identification, or we have
 (?)
(?)
- To determine a, we multiply (?) by (x − 1), then we put x = 1. We have

- To determine b, we multiply (?) by (x − 2), then we put x = 2. We have

- To determine c, we multiply (?) by (x + 3), then we put x = −3. We have

So
 .
.
2-Let the rational fraction here the degree of the numerator is greater than
here the degree of the numerator is greater than
the degree of the denominator, so we perform the Euclidean division

We have x4 − 2x3 + 2x − 1 = (x − 1)3(x + 1), so

with
We write
 (??)
(??)
Now we determine the constant c, we have
For b it suffices to give a value to x in (??), we take for example x = 0, we obtain  . The
. The
decomposition into simple elements of our fraction is written
 .
.
Consequently, we obtain
 .
.
Integrals Reducible to Rational Fraction Integrals
Throughout, R will denote a rational function.
- Integrals of Rational Functions in ex These are integrals of the form R R(ex)dx, where we perform the variable change t = ex, giving
 .
.
Example.
 .
.
We have
We write
 .
.
So
For c, we have

and for d we just need to give a value to x, we find d = −2. Thus
- Rational Functions in cosx and sinx: These are integrals of the form R R(cosx,sinx)dx. We use the variable change
 ), giving
), giving

Example. We want to calculate the integral .
.
We set ), obtaining the integral
), obtaining the integral

This variable change always works but sometimes the calculation is long. There are special cases where we can avoid this change of variable.
- If our integral is of the form R R(sinx)cosxdx, we set t = sinx, dt = cosxdx. Example.

- If our integral is of the form R R(cosx)sinxdx, we set t = cosx, dt = −sinxdx. Example.

- If our integral is of the form R R(tanx)dx or R R(sinx,cosx)dx where cosx and sinx appear only with even powers, we set t = tanx and we have the formulas

Example.

Z
Bioche’s Rule: In the case of an integral of a fraction R(x)dx dependent on sinx, cosx and tanx , we can also use Bioche’s rule which serves to give the appropriate variable change. We set
ω(x) = R(x)dx
We distinguish the following four cases
- First case: If ω(−x) = ω(x) (invariant with respect to −x), we perform the variable change t = cosx.
- Second case: If ω(π − x) = ω(x) (invariant with respect to π − x), we perform the variable change t = sinx.
- Third case: If ω(π + x) = ω(x) (invariant with respect to π + x), we perform the variable change t = tanx.
- Fourth case: If none of the above properties hold, we opt for the variable change
Example.
- Consider the integral
 . We set
. We set
we have
 ) (the variable change t = cosx doesn’t work).
) (the variable change t = cosx doesn’t work).
 ) (the variable change t = sinx doesn’t work).
) (the variable change t = sinx doesn’t work).
 ) (the variable change t = tanx works).
) (the variable change t = tanx works).
Indeed, we have

Thus

- Calculate the integral
 . By taking:
. By taking:  , we have ω(x) =
, we have ω(x) =
ω(−x), so we set t = cosx. The integral I becomes

3. Rational Functions in coshx and sinhx: These are integrals of the form R R(coshx,sinh)dx.
We use the variable change ) and the formulas
) and the formulas

Example.

Special case.
Z
- R(coshx)sinhxdx, we set t = coshx.
Example.

Z
- R(sinhx)coshxdx, we set t = sinhx.
Example.

Z Z
- R(tanhx)dx or R(coshx,sinhx)dx where sinhx and coshx only appear with even powers, we set t = thx and we use the formulas

Example.
 argth(
argth( argth
argth
Remark. As coshx and sinhx are expressed as functions of ex, we can therefore reduce to the case of an integral of a rational function in ex and use the change of variable t = ex.
Example. Consider the integral . We have
. We have
 ,
,
we obtain

Abelian integrals:
- Integrals of the form
the recommended change of variable is .
.
Example Compute the integral
 .
.
We set and
and We get
We get
I = −2argth(t) + 2arctan(t) + C = −2argth
Z
- Integrals of the form R(x,pax2 + bx + c)dx. By writing ax2+x+c in canonical form, this integral is reduced to the following cases
Z
- R(t,p1 − t2)dt, we set t = sinu, t = cosu.
Z
- R(t,p1 + t2)dt, we set t = sinhu.
Z
i) R(t,pt2 − 1)dt, we set t = coshu.
Example. Calculate the integral .
.
We have

We set , we obtain
, we obtain
th(
I
2
=
Z
dt
(
√
3
t
−
1)
√
t
2
+1
=2
Z
ch
udu
ch
u
(
√
3
sh
u
−
1)
2
=
du
(
√
3
sh
u
−
1)
=
2
Z
1
√
3(
2
s
1
−
s
2
)
−
1
2
ds
1
−
s
2
4
=
Z
ds
s
2
+2
√
3
s
−
1
=
Z
1
s
+
√
3
−
2
ds
−
Z
1
s
+
√
3+2
ds
=
ln
s
+
√
3
−
2
s
+
√
3
−
2
+
C
ln
=
th(
argsh
(
t
)
2
)+
√
3
−
2
th(
argsh
(
t
)
2
)+
√
3
−
2
+
C
=
ln
th(
argsh
(
2
x
+1
√
3
)
2
)+
√
3
−
2
argsh
(
2
x
+1
√
3
)
2
)+
√
3
−
2
+
C
(we set t = shu then  .
.
Other types of integrals
Z
- Let I = eαxP(x)dx where α ∈ R and P is a polynomial of degree n (n ∈ N?). We proceed with
n successive integration by parts and we find that the primitives are of the form eαxQ(x) where Q is a polynomial of the same degree as P, which suggests another calculation method namely setting
I = eαxQ(x) + C, derive I to calculate Q. Thus
(eαxQ(x))0 = eαxP(x) = αeαxQ(x) + eαxQ0(x)
so
P(x) = αQ(x) + Q0(x)
which gives the coefficients of Q by simple identification.
Z
Example. I = (x2 + 1)exdx = (ax2 + bx + c)ex + C with a, b, c verifying
x2 + 1 = ax2 + bx + c + 2ax + b = ax2 + (b + 2a)x + c
thus by identification a = 1, b = −2 and c = 1, we find I = (x2 −2x+1)ex +C = ex(x2 −2x+1)+C.
Z
- sinm xcosn xdx such that m, n ∈ Z. We have the following cases
- If m is odd and positive, do the change of variable t = cosx.
- If nis odd and positive, do the change of variable t = sinx.
- If m and n even and postives, use the formulas

 Z
Z
- sin(ax)sin(bx)dx −→ use the formula sin(
 Z
Z
- sin(ax)cos(bx)dx −→ use the formula sin(
 Z
Z
- cos(ax)cos(bx)dx −→ use the formula cos(