Hidden Markov Models
Often, we want to reason about a sequence of observations:
speech recognition
robot localization
user attention
medical monitoring
Need to introduce time (or space) into our models
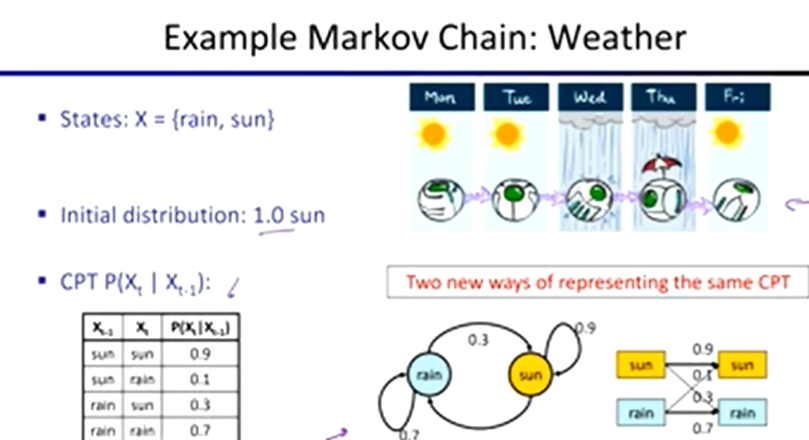
Markov Models
value of X at a given time is called the state
parameters:
called transition probabilities or dynamics
specify how the state evolves over time
stationarity assumption
transition probabilities the same at all times
no choice of action
Conditional Independence
past and future independent given the present
each time step only depends on the previous
this is called the (first order) Markov property
we can always use generic BN reasoning if we truncate the chain at a fixed length
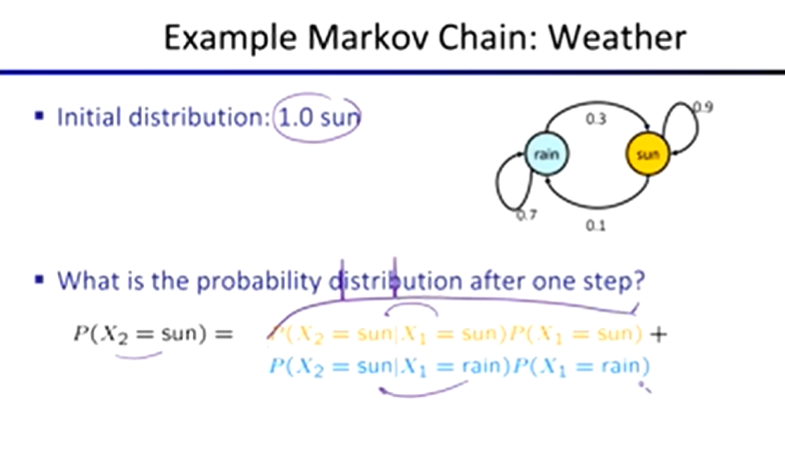
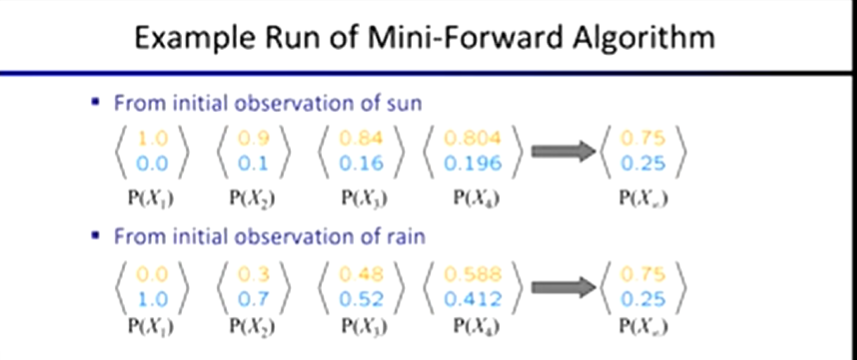
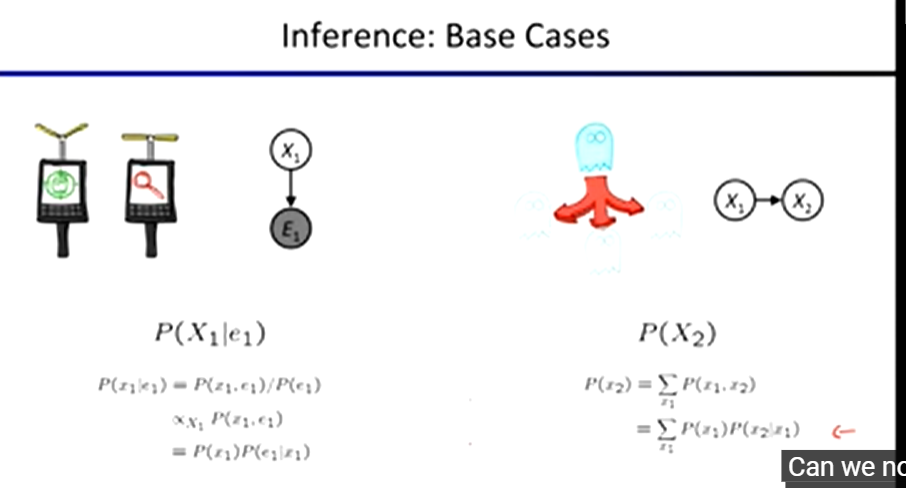
Mini-Forward Algorithm:
P(x1) = known
P(xt) = ∑ P(xt | xt-1) P(xt-1)
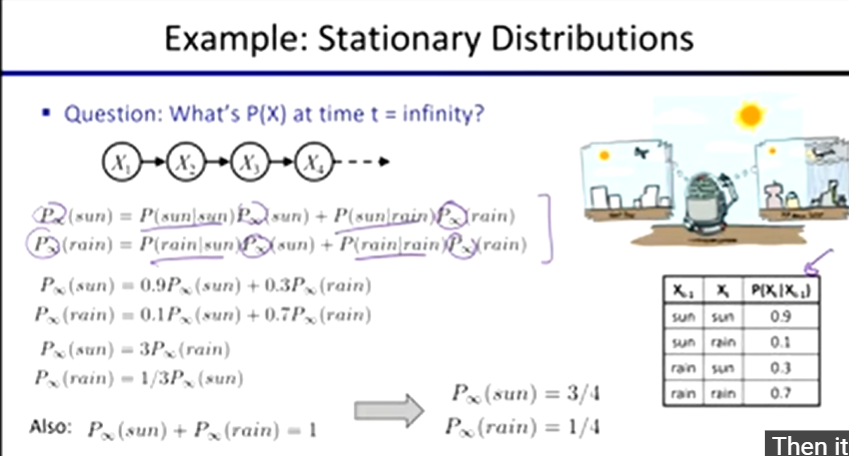
Stationary Distributions
the distribution we end up with is called the stationary distribution Px of the chain
P∞(X) = P∞ + 1(X) = ∑ P(X | x) P∞(x)
Hidden Markov Models
underlying Markov chain over states X
observe outputs (effects) at each time step
Conditional Independence and HMMs
Markov hidden process:
future depends on past via the present
Current observation independent of all else given current state
Filtering / Monitoring
task of tracking the distribution Bt(X) = Pt(Xt | e1, …, et) over time
start with B1(X) in an initial setting, usually uniform
as time passes we update B(X)
Passage of Time:
Assume we have current belief P(X | evidence to date)
B(Xt | e1 : t)
then, after one time step passes
P(Xt + 1 | e1 : t) = ∑ P(Xt + 1 | xt , c1 : t) P(xt | c1 : t)
∑ P(Xt + 1 | xt) P(xt | c1 : t)
Observation:
assume we have current belief P(X | previous evidence)
B’(Xt + 1) = P(Xt + 1 | e1 : t)
then, after evidence
P(Xt + 1 | e1 : t + 1) = P(Xt + 1 , et + 1 | e1 : t) / P(et + 1 | e1 : t)
The Forward Algorithm
given evidence at each time and want to know
Bt(X) = P(Xt | e1 : t)
we can derive the following updates
P(xt | e1 : t) ∝ x P(xt , e1 : t)
= ∑ P(Xt - 1 , xt , e1 : t)