Machine Learning
Machine Learning: how to acquire a model from data / experience
learning parameters
probabilities
learning structure
BN graphs
learning hidden concepts
clustering
neural networks
Naive Bayes
Classification
given inputs x, predict labels (classes) y
ex. medical diagnosis
input: symptoms
classes: diseases
ex. automatic essay grade
input: document
classes: grades
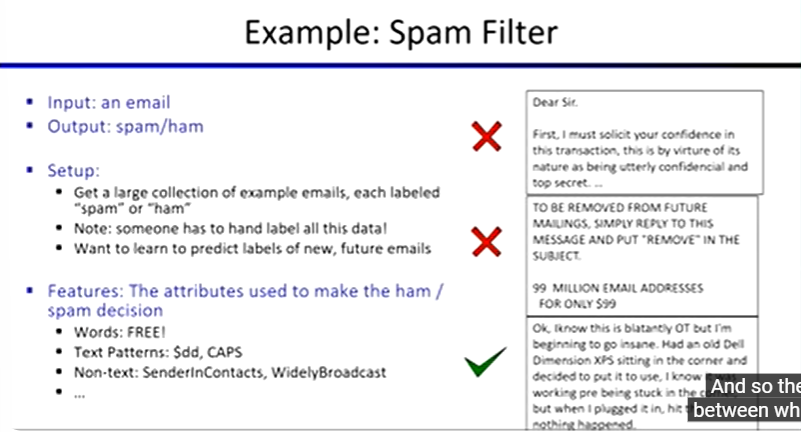
Model-Based Classification
learn by building a model where both output label and input features are random variables
query for the distribution of the label conditioned on the features
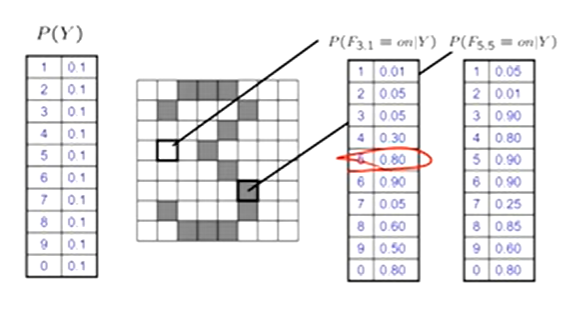
Naive Bayes for Digits
Naive Bayes: assume all features are independent effects of the label
Simple digit recognition version:
one feature (variable) Fij for each grid position <i, j>
features values are on / off, based on whether intensity is more or less than 0.5
each input maps to a feature vector
ex. 1 → (F00 = 0, F01 = 0, F02 = 1, F03 = 1, F04 = 0, … , F1515 = 0)
each binary is valued
Naive Bayes Model:
P(Y | F00 … F1515) ∝ P(Y) ∏ P(Fij | Y)
in general:
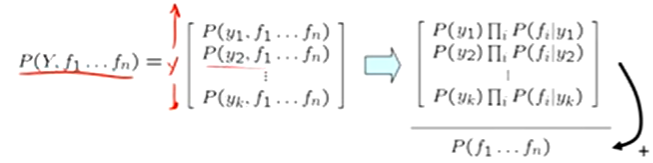
P(Y, F1 … Fn) = P(Y) ∏ P(Fi | Y)
we only have to specify how each feature depends on the class
Inference for Naive Bayes
compute posterior distribution over label variable Y
Step 1: get joint probability of label and evidence for each label
Step 2: sum to get probability of evidence
Step 3: normalize by dividing step 1 by step 2
Estimates of local conditional probability tables:
P(Y), the prior over labels
P(Fi | Y) for each feature (evidence variable)
These probabilities are collectively called the parameters of the model and are denoted by θ
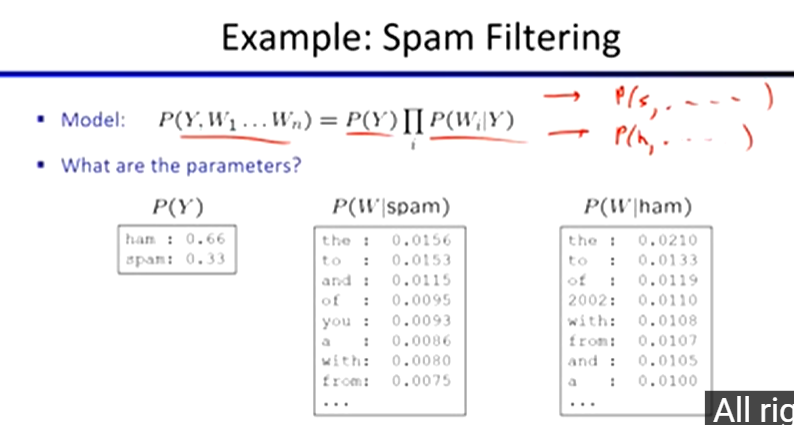
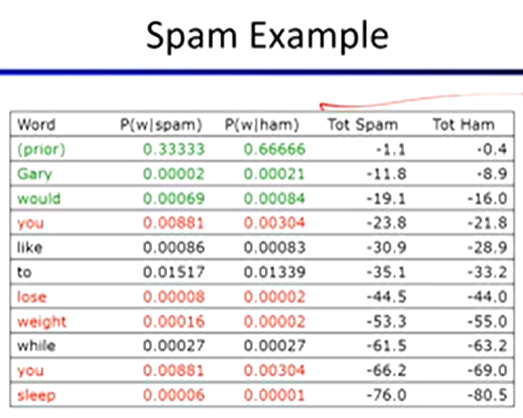
Naive Bayes for Text:
bag-of-words Naive Bayes
features: Wi is the word at position i
as before: predict label conditioned on feature variables
as before: assume features are conditionally independent given label
new: each W is identically distributed
generative model:
P(Y, W1 … Wn) = P(Y) ∏ P(Wi | Y)
“tied” distributions
usually, each variable gets its own conditional probablity distribution P(F | Y)
in bag-of-words model:
each position is identically distributed
all positions share the same conditional probs P(W | Y)
Training and Testing
Empirical Risk Minimization
basic principle of ML
we want the model that does best on the true test distribution
don’t know the true distribution so pick the best model on our actual training set
finding “the best” model on the training set is phrased as an optimization problem
Data: labeled instances
ex. emails marked spam
training set
held out set
test set
Features: attribute-value pairs which characterize each x
Experimentation cycle:
learn parameters on training set
tune hyperparameters on held-out set
compute accuracy of test set
never “peek” at the test set
Evaluation: as many metrics as possible
accuracy: fraction of instances predicted correctly
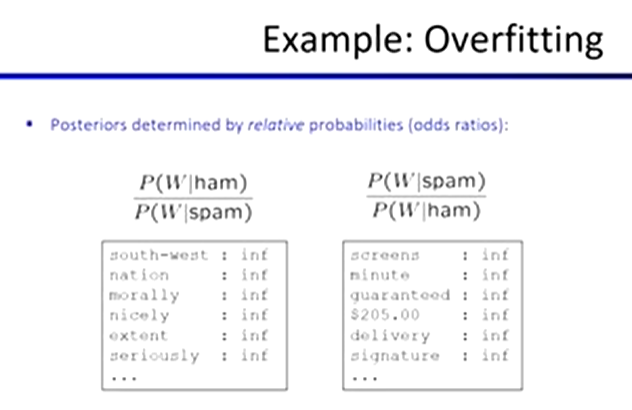
Overfitting and generalization
want a classifier which does well on test data
overfitting:
fitting the training data very closely, but not generalizing well
Parameter Estimation
estimating the distribution of a random variable
elicitation: ask a human
empirically: use training data
for each outcome x, look at the empirical rate of that value
PML(x) = count(x) / total samples
this is the estimate that maximizes the likelihood of the data
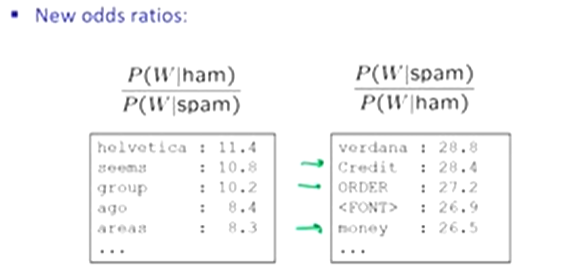
Laplace Smoothing
Laplace’s estimate
pretend you saw every outcome once more than you actually did
PLAP(x) = [c(x) + 1] / [Σx(c(x) + 1)] = [c(x) + 1] / [N + |X|]
pretend you saw every outcome an extra k times
PLAPk(x) = [c(x) + k] / [N + k|X|]
Tuning on Held-Out Data
parameters: the probabilities P(X | Y), P(Y)
hyperparameters: the amount or type of smoothing to do, k, a
Features
need more features to reduce errors
can add these information sources as new variables in the NB model
Perceptrons & Logistic Regression
Linear Classifiers
inputs are feature values
each feature has a weight
sum is the activation
activationw(x) = Σ wi ⋅ fi(x) = w ⋅ f(x)
if the activation is
positive, output +1
negative, output -1
Weights
binary case: compare features to a weight factor
learning: figure out the weight vector from examples
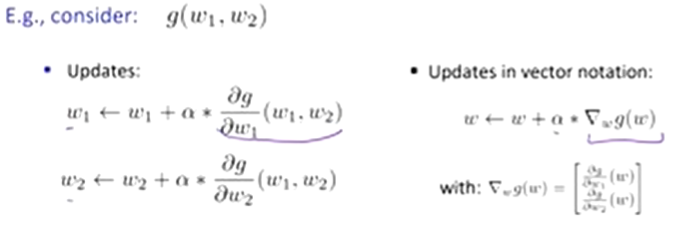
Updates:
Binary Decision Rule
in the space of feature vectors
examples are points
any weight factor is a hyperplane
one side corresponds to Y = +1
other corresponds to Y = -1
Binary Perceptron:
start with weights = 0
for each training instance:
classify with current weights
if correct, no change
correct if y = y*
if wrong, adjust the weight vector
add or subtract the feature vector
subtract if y* is -1
w’ = w + y* ⋅ f
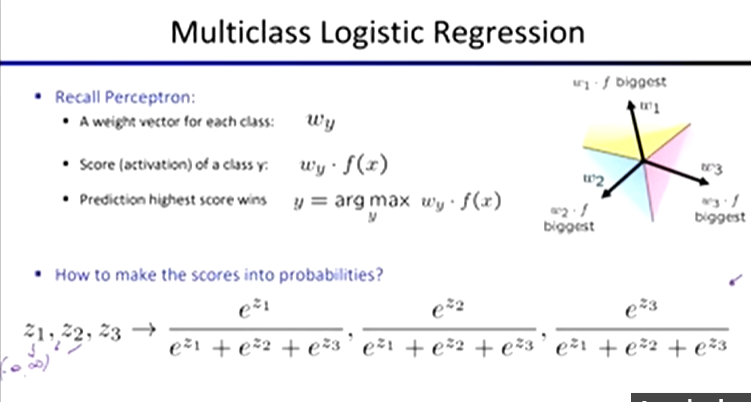
Multiclass Decision Rule
if we have multiple classes (ex. 3)
a weight factor for each class: wy
score (activation) of a class y: wy ⋅ f(x)
prediction highest score wins: y = arg max wy ⋅ f(x)
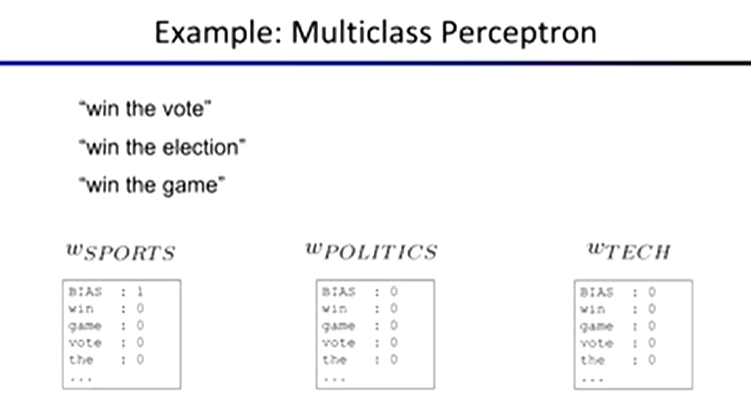
Multiclass Perceptron:
start with all weights = 0
pick up training examples one by one
predict with current weights
y = arg maxy wy ⋅ f(x)
if correct, no change
correct if y = y*
if wrong, lower score of wrong answer, raise score of right answer
wy = wy - f(x)
wy* = wy* + f(x)
Properties of Perceptrons
separability
true if some parameters get the training set perfectly correct
convergence
if the training is separable, the perceptron will eventually converge (binary case)
mistake bound
the maximum number of mistakes (binary case) related to the margin or degree of separability
mistakes < k / s2
Deterministic Decision
perceptron scoring: z = w ⋅ f(x)
if z = w ⋅ f(x) is very positive → want probability going to 1
if z = w ⋅ f(x) is very negative→ want probability going to 0
sigmoid function
Ø(z) = 1 / (1 + e-z)
Multiclass Logistic Regression
Optimization & Neural Networks
Hill Climbing
start wherever
repeat: move to the best neighbouring state
if no neighbours better than current, quit
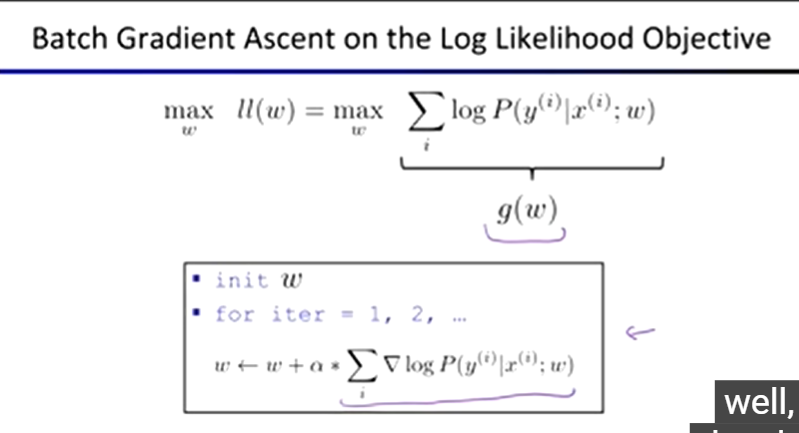
Optimization:
ie: how do we solve
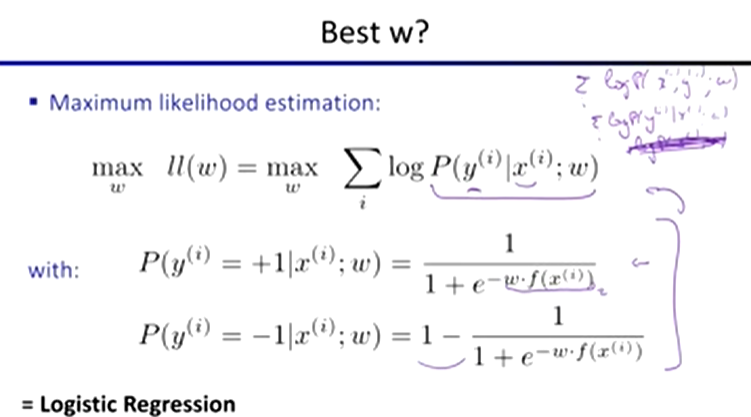
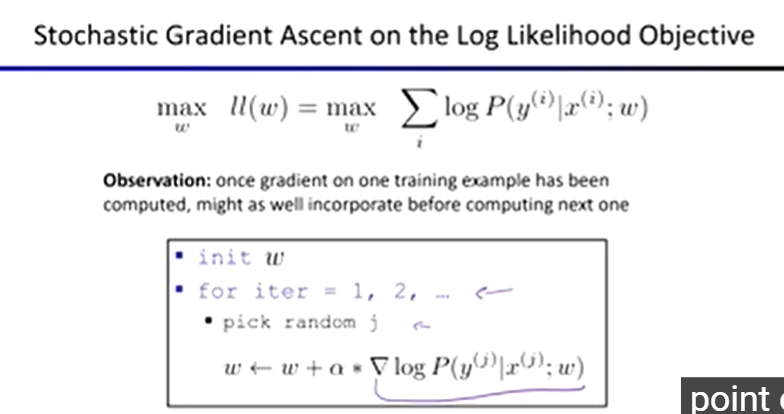
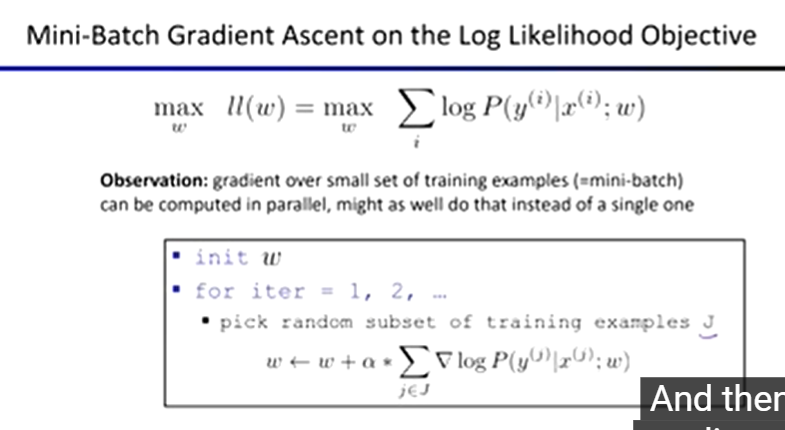
maxw ll(w) = maxw ∑ logP(y(i) | x(i) ; w)
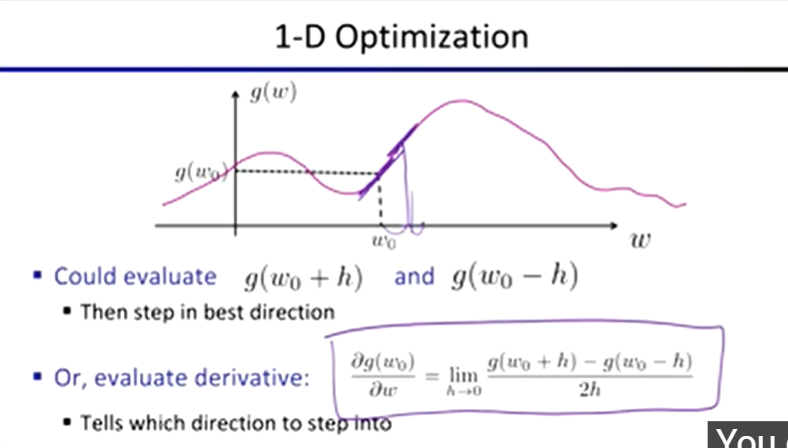
In higher-dimension cases …
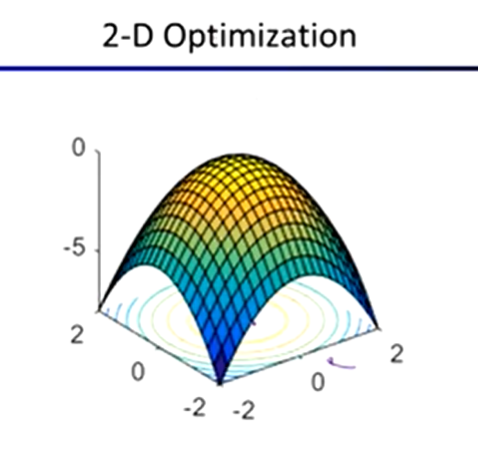
Gradient Ascent
perform update in uphill direction for each coordinate
the steeper the slope (the higher the derivative), the bigger the step for that coordinate
start somewhere
repeat: take a step in the gradient direction
Steepest direction: ∆ = ∇g / |∇g|
procedure:
init w
for iter = 1, 2, …
w ← w + a * ∇g(w)
where a is the learning rate
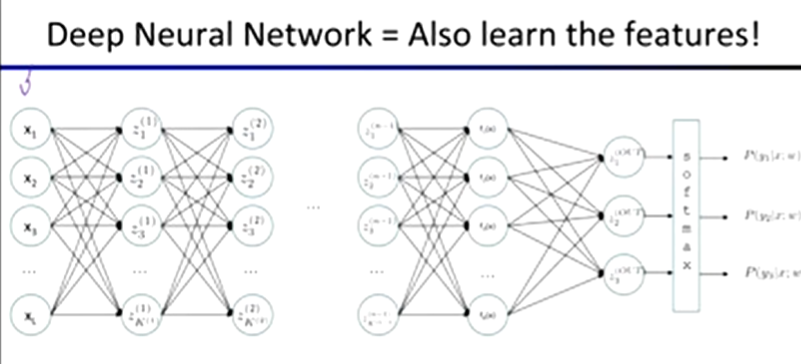
Neural Networks:
properties
universal function approximators
a two-layer neural network with a sufficient number of neurons can approximate any continuous function to any desired accuracy
practical considerations
can be seen as learning the features
large number of neurons
danger for overfitting
Multi-class Logistic Regression: a special case of neural network

each one does a calculation that looks like this:

g = nonlinear activation function
Common Activation Functions

Computing Derivatives:
if neural network f is not in any of the tables…
chain rule!
if f(x) = g(h(x))
then f’(x) = g’(h(x))h’(x)
Automatic differentiation software:
only need to program the function g(x, y, w)
can automatically compute all derivatives
Decision Trees
Inductive Learning
learn a function from examples
input-output pairs (x, g(x))
ex. x is an email and g(x) is spam / ham
problem
given hypothesis space H
given a training set of examples X
find a hypothesis h(x) such that h ~ g
includes:
classification (outputs = class labels)
regression (outputs = real numbers)
Curve fitting (regression, function approximation)
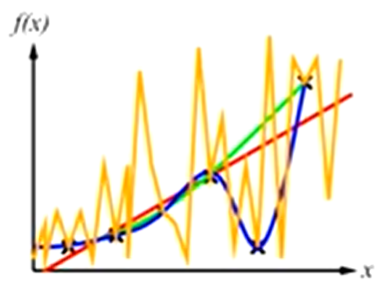
most algorithms favour consistency over simplicity
parabola has a bigger hypothesis space than a line
therefore overfitting is more likely in a parabola
Occam’s Razor:
try to find the simplest explanation of your data
ways to operationalize “simplicity”
reduce the hypothesis space
assume more
have fewer/better features
regularization
smoothing
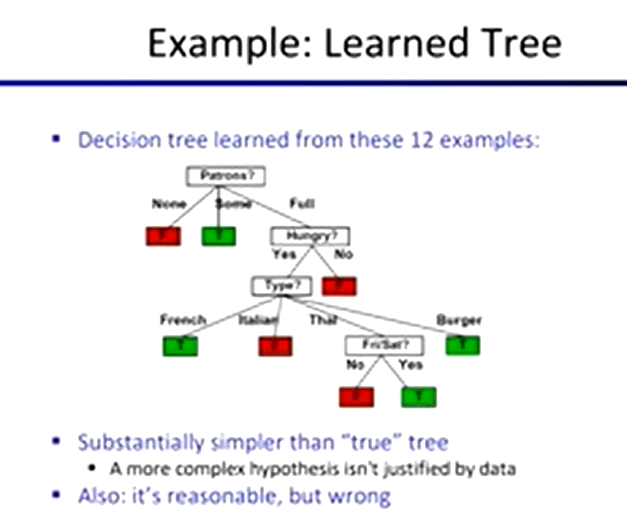
Decision Trees
compact representation of a function
truth table
conditional prob table
regression values
true function
realizable in ff
Hypothesis Spaces
how many distinct decision trees with n boolean attributes?
22^n
how many tress of depth 1 (decision stumps)?
22n = 4n
a more expressive hypothesis space increases…
chance that target function can be expressed (good)
number of hypotheses consistent with training set (bad)
quality of predictions
Decision Tree Learning

Choosing an Attribute
a good attribute splits the examples into subsets that are (ideally) “all positive” or “all negative”
Information
information answers questions
the more uncertain about the answer initially, the more information in the answer
scale: bits
Ans to boolean question with prior <1/2, 1/2>
0 or 1 is only 1 bit being sent
Ans to 4-way question with prior <1/4, 1/4, 1/4, 1/4>
2 bits
Ans to 4-way question with prior <0, 0, 0, 1>
0 bits
Ans to 3-way question with prior <1/2, 1/4, 1/4>
½ + ½ + ½ on average
a probability p is typical of
a uniform distribution of size 1/p
a code of length log 1/p
Entropy
general ans: if prior is <p1, …, pn>
H((p1, …, pn)) = Eplog21/pi
= Σ -pilog2pi
also called the entropy of the distribution
more uniform = higher entropy
more values = higher entropy
more peaked = lower entropy
rare values almost “don’t count”
for each split, compare entropy before and after
difference is the information gain
expected entropy:
weighted by the number of examples
Find the first split:
look for information gain for each attribute
note that each attribute is correlated with the target
Decision Stump
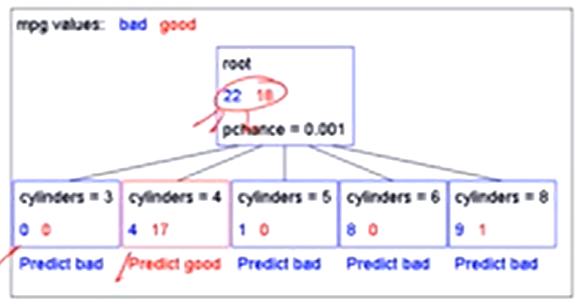
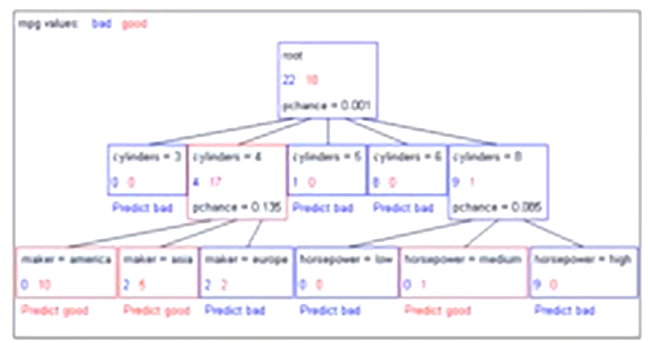
Significance of a Split
starting with:
three cars with 4 cylinders, from Asia, with medium HP
2 bad MPG
1 good MPG
shouldn’t split if the counts are so small that they could be due to chance
a chi-squared test can tell us how likely it is that deviations from a perfect split are due to chance
each split will have a significance value, PCHANCE
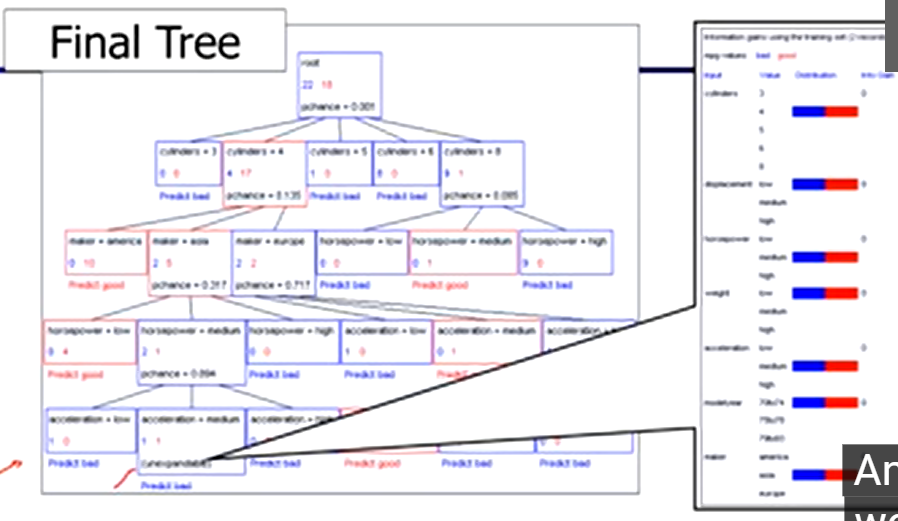
Pruning:
build the full decision tree
begin at the bottom of the tree
delete splits in which PCHANCE > MaxPCHANCE
continue working upward until there are no more prunable nodes