COMPUTER
COMPUTER PARTIAL EXAM REVIEW 7 pages MAY-2024
MECHATRONICS CONTENTS 11ABC
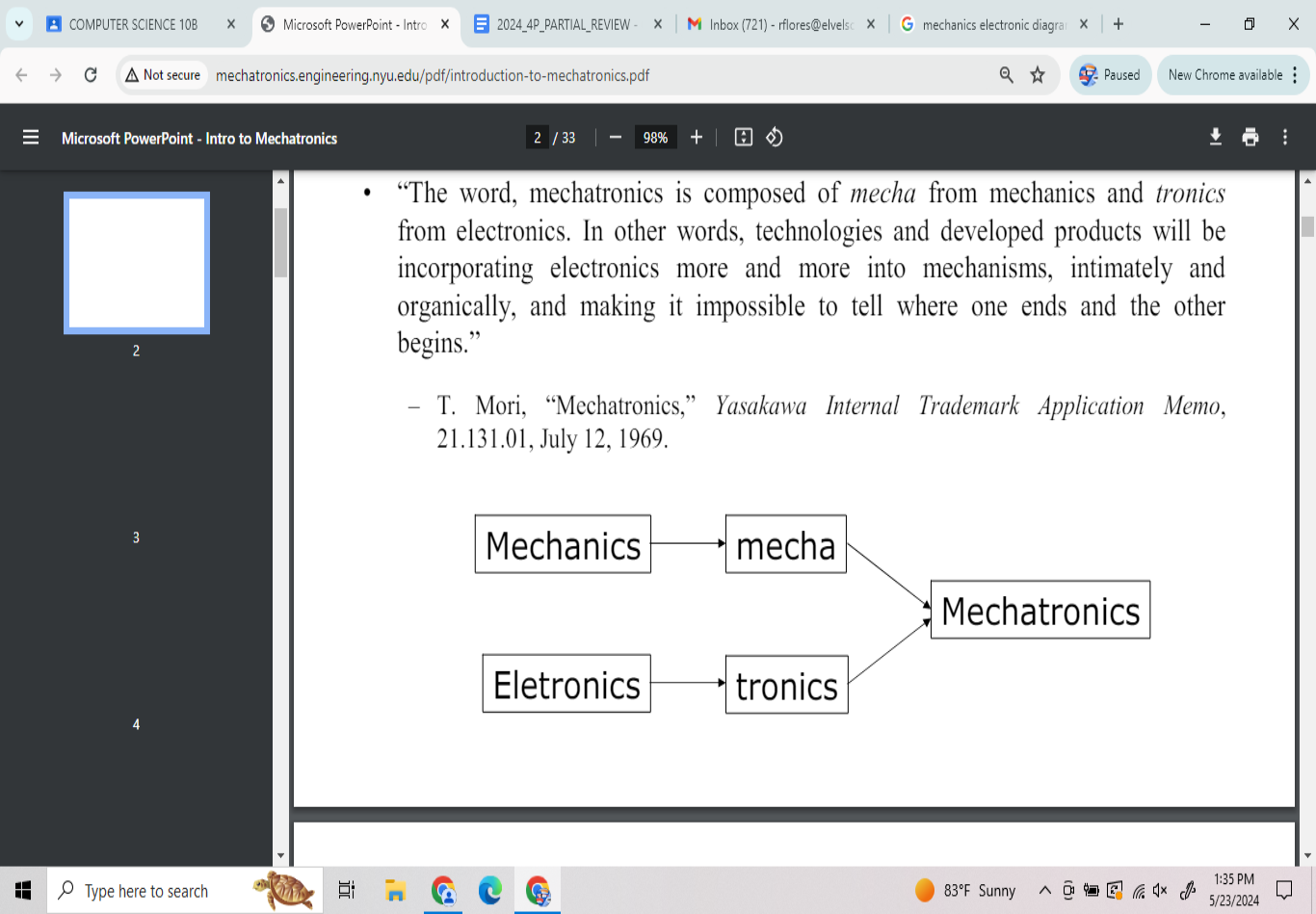
1.The word, mechatronics is composed of mecha from mechanics and tronics
from electronics.
2. Technologies and developed products will be incorporating electronics more and more into mechanisms,
3.Synergistic integration of mechanical engineering with electronics and intelligent computer control in the design and manufacturing of industrial products and processes.
4.Mechatronics is the synergistic integration of sensors, actuators, signal conditioning, power electronics, decision and control algorithms, and computer hardware.
5.Engineered products frequently involve components from more than one discipline.
6.Multi-disciplinary interaction: This is an additive process of brining(combining) multiple
disciplines together to bear on a problem.
7..Cross-disciplinary interaction: In this process, one discipline is examined from the
perspective of another discipline.
8.Systems engineering allows design, analysis, and synthesis of products and processes involving components from multiple disciplines.
9..Mechatronics exploits systems engineering to guide the product realization process from design, model, simulate, analyze, refine, prototype, validate, and deployment cycle.
10.In mechatronics-based product realization: mechanical, electrical, and computer engineering and information systems are integrated throughout the design process so that the final products can be better than the sum of its parts.
11.Technological advances in design, manufacturing, and operation of engineered products/devices/processes can be traced through: – Industrial revolution – Semiconductor revolution – Information revolution.
12.The semiconductor revolution led to the creation of integrated circuit (IC) technology.A2D stands for analog to digital.
13.Effective, miniaturized, power electronics could amplify and deliver needed amount of power to actuators.
14.Now computing hardware is ubiquitous(found everywhere), cheap, and small.
DIAGRAM 1(DISCIPLINARY FOUNDATIONS OF MECHATRONICS
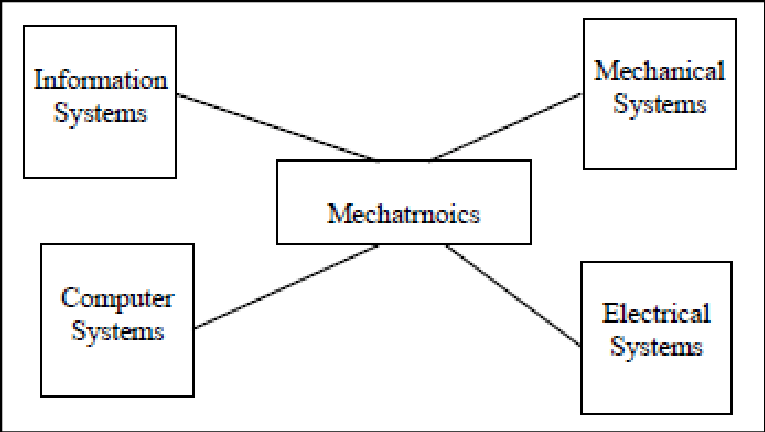
DIAGRAM 2 “The word, mechatronics is composed of mecha from mechanics and tronics from electronics.
ROBOTICS CONTENTS
1) What do you understand by the term robotics?
Robotics is a combined branch of engineering and science which deals with the study of development, operation, and control of intelligent robots. Robotics is a part of Artificial intelligence.
The robotics technology is used for the development of machines which can perform complex human tasks in a very efficient way.
2.) What is a robot?
A robot is a programmable machine which is capable of doing complex tasks automatically with precision and efficiency. The robots can be guided by external or internal input to perform any work.
3. What are the Laws of robotics?
The "Three Laws of robotics" also known as "Asimov's law," given by the author Isaac Asimov. The three laws are given below:
First law: The robot may not injure a human being or, through inaction, allow a human being to come to harm.
Second law: A robot must obey the orders given to it by human beings except where such orders would conflict with the First Law.
Third law: A the robot must protect its own existence as long as such protection does not conflict with the First or Second Laws
4. List the name of the areas where robotics can be applied?
Nowadays robotics can be applied to most of the areas to provide efficient work with the highest precision and in less time. So there is an overview of areas where robots can be applied in day to day life as well.
Military Area
Industrial Area
Agriculture Industries
Domestic Areas
Medical Areas
Researches
TERMS TO STUDY AND KNOW
5)Accuracy is the measurement of the deviation between the command characteristic and the attained characteristic, or the precision with which a computed or calculated robot position can be attained.
6)Actuator
A power mechanism used to effect motion, or maintain position of the robot (for example, a motor which converts electrical energy to effect motion of the robot or when it responds to a signal received from the control system.)
7.Arm
An interconnected set of links and powered joints comprising a robot manipulator that supports and/or moves a wrist and hand or end-effector through space.
8.Assembly Robot
A robot designed specifically for mating, fitting, or otherwise assembling various parts or components into completed products.
9.Computer Aided Design (CAD)
Computer Aided Design (CAD). Computer graphic applications designed to allow engineering of objects (or parts), which are to be manufactured.
10.Centrifugal Force
When a body rotates about an axis other than one at it's center of mass, it exerts an outward radial force called centrifugal force upon the axis, which restrains it from moving in a straight tangential line.
11.Circular Motion Type
A calculated path that the robot executes, and is circular in shape.
12.Clamping
The maximum permissible force acting on a body region, resulting from a robot collision where the period of contact results in a plastic deformation of a person’s soft tissue.
13.Configuration
The arrangement of links created by a particular set of joint positions on the robot. Note that there may be several configurations resulting in the same endpoint position.
14.Control Algorithm
A monitor used to detect trajectory deviations in which sensors detect such deviations and torque applications are computed for the actuators.
15.Collaborative Robot
Term used to describe a robot system designed to operate in one or more of the four collaborative modes.
Safety Monitored Stop
Hand Guiding
Speed and Separation Monitoring
Power and Force Limiting
16.The "brain" of a robot consists of one or more computers running software that process inputs from its sensors and computes outputs that drive the robot's actuators. Communication between the processor, sensors, and actuators is accomplished via wires or sometimes wireless communication.

17.Actual Position:The position or location of the tool control point.
18.Base Link:The stationary base structure of a robot arm that supports the first joint.
19.Compliant robot:A robot that performs tasks,with respect to external forces,by modifying its motions in a manner that minimizes those forces.
20.Contact sensor:A device that detects the presence of an object or measures the amount of applied force or torque applied on the object through physical contact with it.
21.Control algorithm:A monitor used to detect trajectory deviation in which sensors detect such deviations and torque applications are computed for the actuators.
22.Control device:Any piece of control hardware providing a means of human intervention in the control of a robot or robot system.
23.Controller:An information processing device whose inputs are both the desired and measured position.
24.CPU:The central processing unit is the main circuit board and processor of the controller system.
25.Downtime:A period of time, in which, a robot or production line is shut down,due to malfunction or failure.
26.Dynamics:The study of motion,the forces that cause the motion and the forces due to motion.