Uninformed Search
Reflex agents:
agents that have a current percept and maybe memory.
they do not consider the future consequences of their actions.
Planning agents:
ask “what if”
decisions based on consequences of actions
must formulate a goal (test)
Planning vs. Replanning:
planning looks at all options first
replanning only looks at the next option
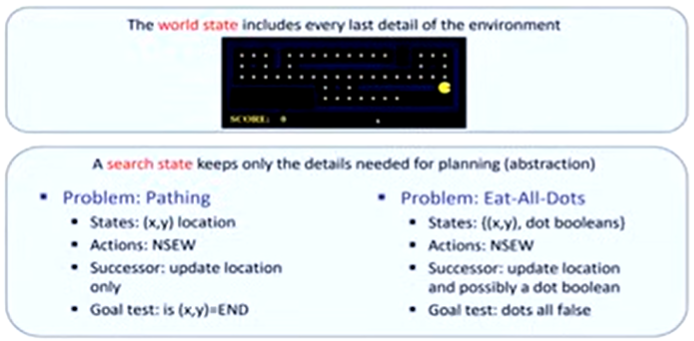
ex. pacman
A search problem consists of:
a state space
a successor function (with actions, costs)
start state
goal test
a solution is a sequence of actions (a plan) which transforms the start state to a goal state
Ex. Travelling in Romania
State space: cities
Successor function: roads (go to adjacent city with cost = distance)
start state: given city
goal test: Is State == given city?
Another Example:
State Space Graphs:
mathematical representation of a search problem
nodes are world configurations
each state only occurs once
arcs represent successors
WAY too big!
Search Trees:
starts with start state then expand out potential plans (tree nodes)
maintain a fringe of partial parts under consideration
fringe: set of leaf nodes waiting to be expanded
try to expand as few tree nodes as possible
a “what if” tree of plans and their outcomes
start state is the root node
children correspond to successors
Depth-First Search:
expand a deepest node first
fringe is a LIFO
b is the branching factor
m is the maximum depth
solutions could be at various depths
number of nodes in a tree: O(bm)
if m is finite, takes time O(bm)
Is it complete?
m could be infinite, so only if we prvent cycles
Is it optimal?
no, it finds the leftmost solution
Breadth-First Search:
expand shallowest node first
fringe is FIFO
search takes time O(bs) where s is the depth of shallowest solution
Is it complete?
s must be finite if a solution exists, so yes
Is it optimal?
only if costs are all 1
When will BFS outperform DFS?
when finding the shortest path
When will DFS outperform BFS?
If all solutions are quite deep, this will be faster
Iterative Deepening:
idea: get DFS’s space advantage with BFS’s time/shallow-solution advantages
Run a DFS with depth limit 1. If no solution…
Run a DFS with depth limit 2. If no solution…
Etc.
Cost-Sensitive Search:
Uniform-Cost Search:
expand the cheapest node first
fringe is a priority queue
Is it complete?
assuming best solution has a finite cost and minimum cost arc is positive, yes
Is it optimal?
yes