11-05-25 Cross Products, Translational Angular Momentum
Angular Momentum
Along with momentum and energy, angular momentum is a fundamental quantity that helps us to predict motion.
We will see how angular momentum is associated with translational and rotational motion
Vector Cross Product
Vector cross product: Way of multiplying two vectors to get a third vector that encodes the right-hand rule
<A_yB_z - A_zB_y, A_zB_x -A_xB_z,A_xB_y-A_yB_x>
Warning:

Vector Cross Product - Construction
The vector cross product assumes the right-hand-rule:
\overline y× \overline x = -\overline z
\overline z × \overline x = \overline y
\overline x × \overline z = -\overline y
\overline x × \overline x = 0
\overline y × \overline y = 0
\overline z × \overline z = 0
It also assumes the distributive law holds:
\overrightarrow A × \overrightarrow B = (A_x \overline x + A_y \overline y + A_z \overline z) × (B_x \overline x + B_y \overline y + B_z \overline z)
=(A_x B_x \overline x × \overline x) + (A_x B_y \overline x × \overline y) + (A_xB_z \overline x × \overline z) + (A_y B_x \overline y × \overline x) + (A_yB_y \overline y × \overline y) + (A_y B_z \overline y × \overline z) + (A_z B_x \overline z × \overline x) + (A_z B_y \overline z × \overline y) + (A_z B_z \overline z × \overline z)
Simplifying:
\overrightarrow A × \overrightarrow B = (A_xB_x \cdot 0) + (A_xB_y \cdot \overline z) + (A_xB_z \cdot -\overline y) + (A_yB_x \cdot -\overline z) + (A_yB_y\cdot 0) + (A_yB_z \cdot \overline x) + (A_zB_x \cdot \overline y) + (A_zB_y \cdot - \overline x) + (A_zB_z \cdot 0)
Grouping like terms gives us:
\overrightarrow A × \overrightarrow B = (A_yB_z - A_zB_y)\overline x + (A_zB_x - A_x B_z) \overline y + (A_xB_y - A_yB_x)\overline z
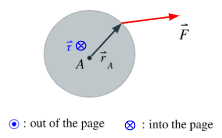
Torque as a vector cross product
The torque created by a force is a measure of the twist (around a reference point) that that force exerts on the system:
\overrightarrow \tau_a = \overrightarrow r_A × \overrightarrow F
Angular Momentum around generic points
The Momentum Principle can be used to tell us what torque around a generic point A will do to a system:

Translational Angular Momentum
Translational angular momentum characterizes the ‘rotation’ of a system around a reference point
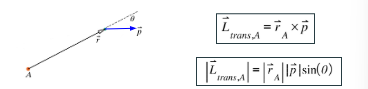
When , the motion is entirely toward/away from A
When , the motion is entirely ‘around’ A