mik short
1. Jaký je rozdíl mezi mikroprocesorem a mikrokontrolérem?
Mikroprocesor: Nemá vlastní integrovanou paměť pro programy a data – ty se ukládají na externí úložiště – a jsou k němu připojovány další pomocné vstupní/výstupní (I/O) obvody.
Mikrokontrolér: Má RAM, paměť, I/O obvody intealugrované v jednom pouzdře.
2. K čemu slouží ALU?
ALU: Aritmetická logická jednotka – vykonává aritmetické a logické operace.
3. Co je a k čemu slouží STATUS registr a příznakové (status) bity?
STATUS registr ALU: Uchovává informace o provedených operacích. Obsahuje příznakové bity:
Carry (C): Přenos do vyššího řádu nad rozsah registru.
Zero (Z): Výsledek operace je nula.
Negative (N): Indikuje, že výsledek je záporný.
Digit Carry (DC): Přenos spodní číslice (spodní 4 bity) do vyššího řádu.
Overflow (OV): U operace se znaménky indikuje přetečení do znaménkového (7.) bitu.
4. Co je, k čemu slouží a co je obsahem Programového čítače (Program counter)?
Programový čítač (PC): Registr, který obsahuje adresu následující instrukce. Většinou se sám inkrementuje.
5. Co je, k čemu slouží a co je obsahem Zásobníku (Stack)?
Zásobník: Obsahuje návratové adresy. Při volání podprogramu (funkce) nebo při přerušení se do něj ukládá aktuální hodnota PC před skokem.
6. Jaká jsou základní nastavení portů mikrokontroléru?
Nastavení:
Vstupní/výstupní
Analog/digitál
Pull-up
Rychlost pinu
Push-pull/open-drain
Detailně pro PIC:
ANSEL registr: Log. 0 = digitální funkce pinu / Log. 1 = analogová funkce.
TRIS registr: Log. 0 = výstup (output) / Log. 1 = vstup (input).
LAT registr: Zápis logických úrovní na výstupní piny.
PORT registr: Čtení logických úrovní na vstupech.
SLRCON registr: Výběr rychlosti změny stavu na výstupních pinech.
WPU registr: Připojení "weak pull-up" rezistorů.
INLVL registr: Výběr vstupní rozhodovací úrovně Schmitt Trigger/CMOS/TTL.
ODCON registr: Typ výstupu push-pull nebo open-drain.
7. Co je operace read-modify-write a jaké při ní mohou nastat komplikace?
Operace: Sekvence, kterou mikrokontroléry PIC provádějí při změně dat na portech:
Mikrokontrolér přečte stav pinů do dočasného registru.
Provede požadované úpravy.
Zapíše zpět na port.
Komplikace:
Pokud je i přes požadovanou log. 1 na pinu nižší napětí, vyčtený stav v dočasném registru je 0 – ta se zapíše zpět na port.
Při paralelní operaci více vláken může se stat, ze jedno vlakno zapise hodnotu drive a tím dojde ke ztrátě spravne hodnoty.
8. Jakým způsobem se ošetřují zákmity tlačítek?
Hardwarově: RC filtr, který nepropustí rychlé zákmity.
Softwarově: Časové okno po stisku, kdy mikrokontrolér "nevnímá".
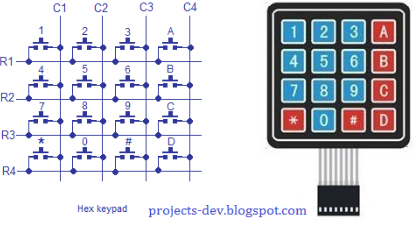
9. Co je maticová klávesnice, jak zjistit pozici stisknutého tlačítka a jaké má výhody?
Zjištění pozice: Skenováním řad a/nebo sloupců.
Výhody: Nízký počet GPIO pinů (nejsou na kazde tlacitko)
Nevýhody: Složitější vyčítání v softwaru.
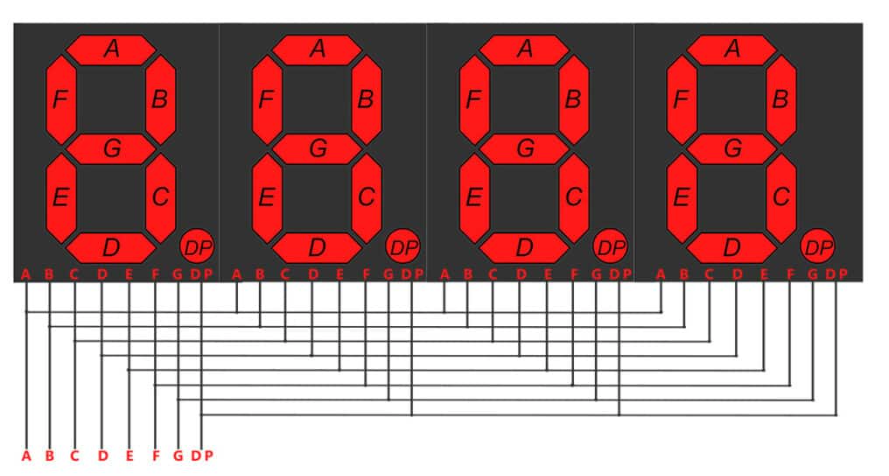
10. Jak probíhá zobrazování dat na displeji složeném z více sedmisegmentových zobrazovačů a jaké má výhody?
Multiplexing: Střídání číslovek rychleji, než je oko schopno zachytit.
Výhody: Nižší počet GPIO pinů (přepínání pomocí tranzistorů na zem ovládaných mikrokontrolérem).
11. Co je přerušení a k čemu slouží?
Přerušení: Odklon od normálního běhu programu na základě vnitřní nebo vnější události.
Slouží k obsluze důležitějších událostí, např. zmáčknutí tlačítka.
Procesor nemusí neustále hlídat vstupy, pouze reaguje na přerušení.
12. Jaké znáte zdroje přerušení?
PORT: Změna stavu pinu.
ADC: např. při dokončení konverze.
TIMER: např. při přetečení.
13. Co se děje v mikrokontroléru při vyvolání přerušení?
Zjednodušeně:
Adresa aktuální instrukce + data v paměti se odloží stranou (zásobník/stínové registry).
Do PC se načte adresa první instrukce přerušení.
Vykoná se celá obsluha přerušení.
Na konci se vrátí odložená data zpátky na svoje místo a program pokračuje dál.
Složitěji:
Hodnota PC je uložena do zásobníku.
Hodnoty z registrů BSR, WREG a STATUS jsou uloženy do stínových registrů (volitelné).
Do PC je uložena adresa vektoru přerušení.
Je vykonána obsluha přerušení.
Instrukcí retfie (return from interrupt) se do PC uloží adresa z aktuální pozice v zásobníku, čímž se provede návrat k normálnímu běhu programu.
14. K čemu slouží priority a jak s nimi pracovat?
Pouze přerušení s vyšší prioritou může přerušit obsluhu přerušení s nižší prioritou.
Obsluha přerušení vyšší priority nemůže být přerušena přerušením nižší ani vyšší priority.
15. Jak nastavit zdroj přerušení?
Pomocí konfiguračních bitů daného zdroje.
Povolení přerušení pro zdroj (enable bit).
Globální povolení přerušení (priority bit).
Zdroj přerušení vyčteme z flag bitů.
16. Jak zjistíme, jaký zdroj přerušení vyvolal přerušení a jak zajistíme jeho obsluhu?
Unikátní Flag bit zdroje, který přerušení vyvolal, bude 1.
Během obsluhy přerušení se tento bit zkontroluje a vykoná se příslušná obsluha.
Po dokončení obsluhy se flag bit vynuluje.
17. K čemu slouží modul PPS?
PPS (Peripheral Pin Select) slouží k připojení periferií na vstupy a výstupy mikrokontroléru.
Je to integrovaný konfigurovatelný přepínač, který propojuje interní periferie mikrokontroléru s vnějšími piny.
18. Jakým způsobem připojit vnitřní periferii na vstup/výstup mikrokontroléru?
Pomocí modulu PPS (Peripheral Pin Select).
19. Co to jsou časovače (timery) a k čemu slouží?
Samostatný blok mikrokontroléru, který běží nezávisle na procesoru.
S každým svým instrukčním cyklem se inkrementuje hodnota.
Má možnost vyvolat přerušení při přetečení.
20. Jaké znáte módy činnosti časovačů?
Synchronní mód.
Asynchronní mód.
21. K čemu slouží obvody RTC a RTCC?
RTC (Real Time Clock) a RTCC (Real Time Clock and Calendar):
Specializované obvody pro uchování informace o čase, případně datumu.
22. Jak vypadá zapojení a uspořádání sedmisegmentového zobrazovače?
23. Jak vypadá konstrukce čtyřvodičového a pětivodičového rezistivního dotykového panelu, jejich výhody a nevýhody?
Čtyřvodičový:
Struktura:
Dvě vrstvy potažené rezistivní vrstvou, elektrody na protilehlých stranách.
Výhody:
Nízká cena.
Snadné vyhodnocení.
Vysoké rozlišení.
Lze ovládat čímkoliv (prst, tužka...).
Nevýhody:
Nižší průzračnost panelu (cca 80 %).
Měkká povrchová vrstva, náchylná k poškrábání.
Pětivodičový:
Struktura:
Obdobna jako u 4-vodicoveho panelu, ale ma jine usporadani elektrod. Čtyři elektrody (Y, H, L, X) na jedné vrstvě, jedna Sense elektroda na horní vrstvě.
24. Jak probíhá zjištění souřadnic dotyku u čtyřvodičového a pětivodičového rezistivního dotykového panelu?
Čtyřvodičový:
Struktura: dvě vrstvy s rezistivními vrstvami
Vrstva A: Elektrody na levé a pravé straně.
Vrstva B: na horní a spodní straně.
Měření:
Pro osu X - Mezi pravou a levou elektrodu vrstvy A připojí napájecí napětí. Spodní elektroda vrstvy B se připojí na A/D převodník, který změří polohu po stisku (spojeni dvou vrstev).
Pro Y - skoro stejny postup, ale jinex vrstvy s jinymi elektrodami.
Pětivodičový:
Klidový stav:
Elektrody Y, H, L a X mají napětí 5 V.
Elektroda Sense je připojena na zem přes velky rezistor.
Při dotyku:
Na Sense se objeví napětí a proběhne měření ve 2 krocích:
Krok 1 (osa X): Elektrody H a X jsou napajeny 5 V, Y a L uzemněny. Napětí na Sense určí polohu na ose X.
Krok 2 (osa Y): Elektrody Y a H jsou napajeny 5 V, X a L uzemněny. Napětí na Sense určí polohu na ose Y.
25. Jak vypadá konstrukce kapacitního dotykového panelu PCT a jak se nejčastěji zjišťují souřadnice dotyku?
Konstrukce: Dotykovou plochu vyhodnocuje elektronika, která v pravidelných vzorkovacích intervalech měří změnu kapacity jednotlivých miniaturních snímacích plošek řádkové X a sloupcové Y vrstvy.
Výhody:
Vysoká odolnost.
Vysoké rozlišení.
Vysoká průzračnost panelu.
Nevýhody:
Ovládací prvek musí být z vodivého materiálu (kovový stylus, prst).
Vyšší cena.
Složitější vyhodnocovací obvody.
26. Konstrukce a princip činnosti SAW dotykových panelů?
Konstrukce: Čtyři piezoměniče - dva vysílají, dva přijímají.
Princip činnosti:
Signál se šíří polem reflektorů, které část signálu odrazí a část propustí na další reflektory.
Při dotyku je část signálu absorbována a nedostane se k přijímači.
Porovnáním přijatého signálu se zjistí souřadnice dotyku.
27. Jakým způsobem se typicky vyhodnocuje dotyk u kapacitních dotykových tlačítek?
Připojením rezistoru se z tlačítka s rezistorem stane RC článek. Dotykem se změní kapacita a tím i doba nabíjení/vybíjení.
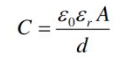
28. Jaké parametry mají vliv na konstrukci kapacitních dotykových tlačítek?
Plocha.
Tloušťka dielektrika.
Permitivita dielektrika.
29. Princip činnosti AD převodníku s postupnou aproximací, postup převodu, blokové schéma?
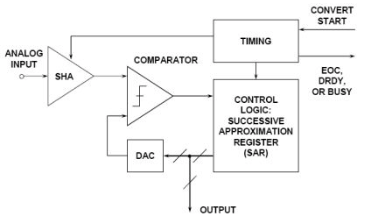
Výstup DAC je porovnáván se vstupním signálem.
Postupně se přidává od nejvýznamnější bitu (MSB) a dokola porovnává.
30. Jak se zjistí hodnota měřeného napětí z výstupní hodnoty AD převodníku?
Vydělím výstupní hodnotu rozsahem a vynásobím referenčním napětím.
31. Jaká bude hodnota výstupu AD převodníku při známém vstupním napětí?
32. Co je to citlivost a rozsah AD převodníku?
Citlivost: Minimální změna vstupního napětí, kterou dokáže převodník rozlišit.
Rozsah: Maximální rozsah vstupního napětí, které je převodník schopný převádět.
33. Jaký je rozdíl mezi Von Neumannovou a Harvardskou architekturou?
Von Neumannova:
Společná paměť pro data a instrukce.
Během programu je možné měnit data i instrukce, čímž se ovlivňuje chování programu.
Harvardská:
Oddělený paměťový prostor pro data a pro program.
34. Charakteristika architektury RISC a CISC
CISC (Complex Instruction Set Computer):
Soubor instrukcí většinou pres 200.
Málo registrů.
Mikroprogramový řadič (každá nová instrukce vyžaduje nový mikroprogram nebo jejich sled).
Složitější struktura.
Řídicí obvody zabírají na čipu přibližně 60 % místa.
Příklad: architektura x86.
RISC (Reduced Instruction Set Computer):
V procesoru realizujeme pouze nezbytné funkce.
Instrukce mají pevnou délku a formát.
Složitost je částečně přenesena na kompilátor.
Jednodušší struktura → vyšší rychlost.
Řídicí obvody zabírají na čipu pouze 6–10 % místa.
Příklad: architektura ARM.
35. Charakteristika architektury accumulator a load-store
Accumulator:
Využívá jeden speciální registr nazývaný akumulátor (Accumulator).
Slouží k provádění všech aritmetických a logických operací.
Akumulátor je jedním z operandů.
Load-store:
Odděluje přístup do paměti (načítání a ukládání dat) od aritmetických a logických operací.
Data musí být před zpracováním nejprve načtena do registrů.
36. Co je instrukční sada, typy instrukcí?
Instrukční sada: Soubor instrukcí, které procesor podporuje.
Typy instrukcí:
„Byte-oriented“ operace.
„Bit-oriented“ oprerace.
Operace s čísly.
Kontrolní operace.
37. K čemu slouží programový čítač a co je jeho obsahem?
Programový čítač:
21bitový registr.
Uchovává adresu instrukce, která bude provedena v následujícím instrukčním cyklu.
38. K čemu slouží zásobník (hardware stack) ve spojení s přerušením a větvením programu a co je jeho obsahem?
Zásobník:
Uchovává návratové adresy z volání podprogramů nebo přerušení.
39. Co jsou a k čemu slouží konfigurační bity mikrokontroléru?
Konfigurační bity:
Slouží k nastavení základních parametrů mikrokontroléru.
Například:
Výběr obvodu oscilátoru.
Ochranu proti vyčtení paměti.
Povolení různých periferií.
40. K čemu slouží obvody oscilátoru a jaké jsou možnosti volby zdroje hodinového signálu mikrokontroléru?
Účel: Časování všech procesů v mikrokontroléru (možnosti závisí na konkrétním mikrokontroléru)
Možnosti:
Interní nebo externí oscilátor.
Vysoká nebo nízká frekvence.
PLL (Phase-Locked Loop) pro zvýšení frekvence.
41. Co je watchdog timer a jak ho využít pro bezpečnější běh programu mikrokontroléru?
Účel: Časovač, který provede restart mikrokontroléru po nastavené době.
Využití:
Pokud program běží normálně, je watchdog timer průběžně nulován.
Pokud program zasekne, watchdog doběhne do konce a resetuje mikrokontrolér.
42. Jaké jsou zdroje resetovacích signálů a jejich význam pro bezpečnější činnost mikrokontroléru?
Power-on Reset (POR): Reset při zapnutí napájení pro známý startovací stav.
Brown-out Reset (BOR): Aktivace při poklesu napětí pod určitou úroveň.
Watchdog Timer Reset: Reset při zamrznutí programu nebo nekonečné smyčce.
Externí Reset: Manuální reset pomocí tlačítka nebo obvodu.
Software Reset: Spuštění restartu mikrokontroléru programově.
43. Jaké jsou aplikační oblasti procesorů Cortex-M?
Aplikace: Mikrokontroléry, chytré senzory, mixed signal aplikace, automobilová elektronika, a další.
44. Co je bit banding a k čemu slouží?
Účel: Adresování jednotlivých bitů v RAM.
Výhoda: Umožňuje měnit hodnotu bitů bez sekvence RMW (Read Modify Write).
45. Jaké znáte registry mikrokontrolérů Cortex-M a jaký je jejich význam?
R0 – R12: Všeobecné registry pro výpočty a uchovávání dat.
R13 (SP): Stack Pointer – ukazuje na vrchol zásobníku.
R14 (LR): Link Register – ukládá návratovou adresu z funkce.
R15 (PC): Program Counter – ukazuje na aktuální instrukci.
46. Co je CMSIS a k čemu slouží?
CMSIS (Cortex Microcontroller Software Interface Standard): Poskytuje HW abstrakci pro přenositelnost kódu mezi mikrokontroléry.
47. Jaké znáte číselné soustavy, jaké jsou jejich výhody oproti ostatním?
Desítková (decimální): Základ 10, přirozená pro člověka.
Dvojková (binární): Základ 2, snadná implementace v počítačích.
Osmičková (oktalová): Základ 8, kompaktní zápis, snadný převod mezi binární a osmičkovou.
Šestnáctková (hexadecimální): Základ 16, kompaktní zápis pro binární data, využívá se v informatice (adresy paměti).
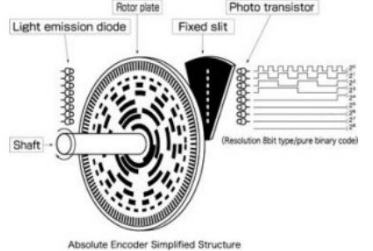
48. Jak vypadá konstrukce a výstupní signál z absolutního rotačního enkodéru?
Konstrukce: Obsahuje pevný referenční bod pro každou pozici.
Výstupní signál: Přímo určuje aktuální pozici.
49. Jak vypadá konstrukce a výstupní signál z dvojitého inkrementálního rotačního enkodéru?
Konstrukce: Obsahuje dva signály posunuté o 90°.
Výstupní signál: Kódování pohybu v obou směrech, umožňuje detekci směru.
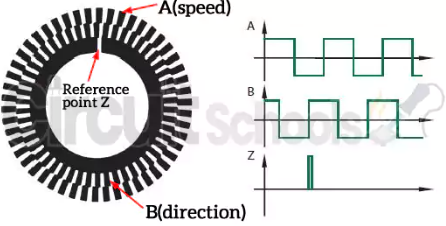
50. Jaké fyzikální veličiny lze zjistit z výstupních signálů rotačních enkodérů?
Měření: Rychlost a zrychlení.
51. Co je bootloader a k čemu slouží?
Bootloader: Program v mikrokontroléru, který umožňuje přenos dat mezi programovou pamětí a jiným zařízením, např. PC.
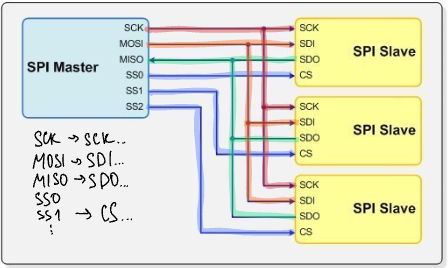
52. Základní charakteristika SPI sběrnice, rychlost komunikace, počet zařízení, zapojeni tři zařízení?
Hlavní piny (3): SCK (clock), SDI (data in), SDO (data out), CS (chip select).
Singlemaster
Počet zařízení: Omezen počtem CS pinů, ktery muzeme ovladat.
Rychlost: clock signál až 50 MHz.
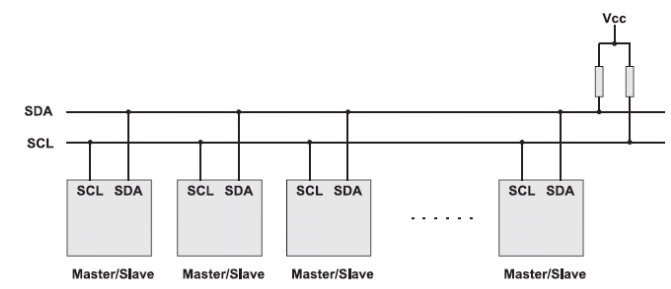
53. Základní charakteristika I2C sběrnice, rychlost komunikace, zapojeni tři zařízení?
Multimaster
Hlavní piny (2): SDA (data), SCL (clock).
Výběr zařízení: Pomocí 7bit adresy, max 128 zařízení.
Start/stop podmínky: Signály pro zahájení a ukončení komunikace (SCL - H, SDA - meni se).
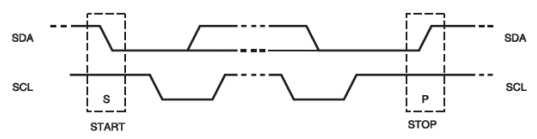
Rychlost komunikace:
100 kHz, 400 kHz (speciálně 1 - 3,4 MHz, jednosměrně až 5 MHz)
54. Jak je řešena detekce kolize na I2C sběrnici?
Detekce kolize: Pokud je na SDA vysílána úroveň high a vysílací stanice zjistí low, musí přerušit vysílání.
55. Porovnání parametrů SPI vs I2C.
SPI: Vysoká rychlost, složitější implementace, až 1 slave, singlemaster, 3+1 vodiče.
I2C: Nižší rychlost, jednodušší, více zařízení, multimaster, 2 vodiče.
56. Základní charakteristika 1-wire sběrnice a napájení obvodů.
Charakteristika: Sériová obousměrná half-duplex sběrnice, single master, multi slave.
Jeden datový a jeden zemnící vodič (GND)
Komunikace: Prochází časovými sloty, každý slot představuje 1 bit (log. 1 nebo 0).
Napájení: Napájení přes datový vodič (log. 0 napájí kondenzátor 800-2000 pF).
57. Základní charakteristika UART a USB sběrnice, rychlost komunikace, převodníky UART<-> USB.
UART:
Asynchronní sériová komunikace.
Rychlost 300-1200 kbit/s (závisí na zařízení).
Full nebo half duplex.
USB:
Single master.
Rychlost 1,5 - 80000 Mbit/s (záleží na standardu (generace) 1.0-4.2).
Komunikace pomocí paketů.
Převodníky UART <-> USB: Umožňuje připojení mikrokontrolérů k PC bez větších znalostí USB rozhraní.
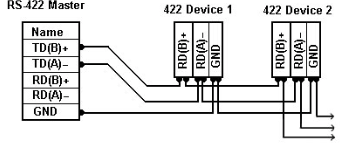
58. Základní charakteristika a parametry sběrnice RS422, jeji schema a vyhody pred RS232.
Charakteristika: 2 pary Twisted pair, point-to-point
Přenosová rychlost a vzdálenost: Až 2,5 MB/s na 1200 m.
Linky přenášejí pouze data a nepoužívají žádné řídicí signály.
RS422 vs RS232:
RS422: Více příjímačů, větší vzdálenost, rychlejší, využívá diferenciální signály
RS232: Pouze 1 příjímač, kratší vzdálenost, pomalejší.
59. Základní charakteristika a parametry sběrnice RS485, jeji schema a vyhody pred RS232.
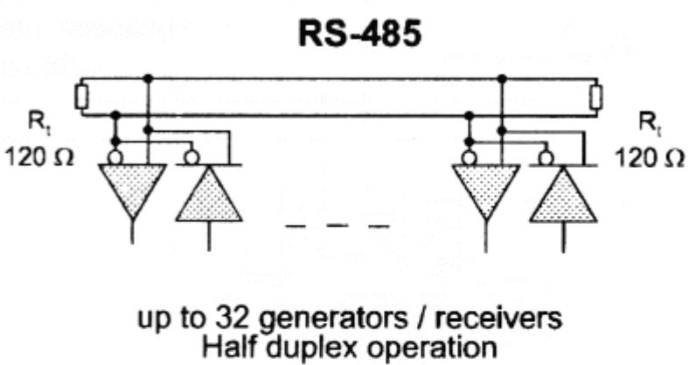
do 32 prijimacu half duplex
Charakteristika: Diferenciální přenos, multipoint komunikace, architektura Master/Slave (každý Slave má svou unikátní adresu).
Přenosová rychlost a vzdálenost: Až 2,5 Mbit/s na 1200 m (až 10 Mbit/s na kratší vzdálenosti).
Pouziva jeden nebo dva TP páry
RS485 vs RS232:
RS232: Jeden přístroj, jen na 20 m, pomalejší, více datových vodičů (9)
60. Řízení otáček a směru otáčení malovýkonového DC motoru.
Řízení:
Lineárně: Menší výkon, menší řušení, větší ztráty.
Pulzně (PWM): Vyšší výkon, větší řušení, menší ztráty.
Směr: Řízení změnou polarity napájení pomocí H můstku (čtyři spínací prvky).
61. Konstrukce modelářského servomotorku a časový průběh řídicího signálu.
Konstrukce: elektromotor, potenciometr, řídicí elektronika, převodovka
PWM - pulzně šířková modulace
s periodou 20 ms, log. 1 trvá 0,9 - 2,1 ms.
62. K čemu slouží krokový motor a jeho konfigurace cívek, módy činnosti/ovládání.
Účel: Přesná kontrola pozice a rychlosti.
Konfigurace cívek:
Unipolární: Jeden směr proudu jednou civkou.
Bipolární: Dvě cívky současně, mg pole proti sobe.
Módy řízení:
Plný krok, poloviční krok - velikost kroku
Jednofázové, dvoufázové řízení - pocet buzených vinutí
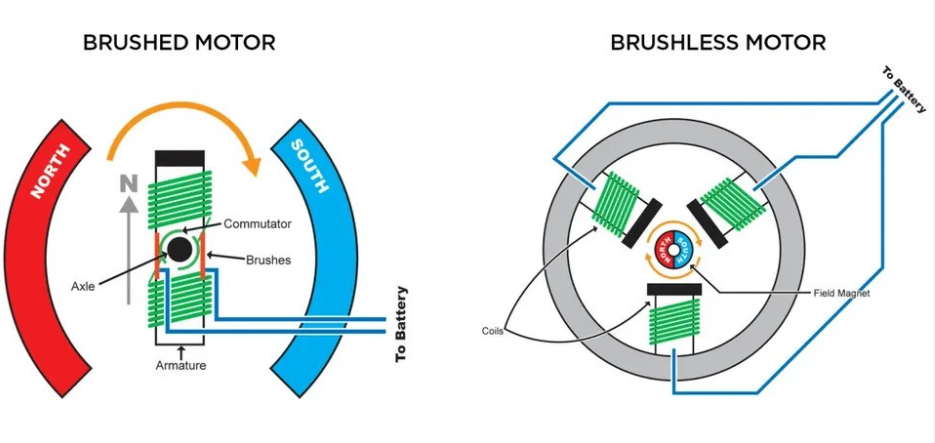
63. Konstrukce BLDC motoru a rozdíl oproti DC motoru.
DC motor: Integrovaný komutátor, řízení rychlosti změnou napětí.
BLDC motor: Bez komutátoru, elektronická komutace pomocí regulátoru otáček.
→Motor = rotorem z permanentních magnetů, stator = cívky navinute na pólových nástavcích
Řízení BLDC:
Six-step komutace
Sinusové proudy (FOC)
Bezsenzorové adaptivní řízení
Využití AI pro řízení.
64. Co jsou jednotky Capture, Compare a PWM a k čemu slouží?
Capture: HW jednotka v mikrokontroléru pro měření času mezi událostmi (např. měření délky pulzů).
Compare: HW jednotka, která porovnává časové registry s uloženou hodnotou a na základě toho generuje např. přerušení.
PWM (Pulse Width Modulation): Generace šířkově modulovaného signálu, což je užitečné pro řízení výkonu motorů
Výhody: Všechny tyto jednotky jsou odděleny od procesoru, což šetří výpočetní výkon mikrokontroléru a umožňuje jejich samostatnou činnost.