Module 5.2
Powered Flight
Hovering Flight
The helicopter stays in one place in the air without moving forward, backward, or sideways.
Translating Tendency or Drift
It is the movement of the helicopter to the right due to the combination of main rotor torque and tail-rotor anti-torque.
To counteract this:
Lateral cyclic
Main rotor rigging
Cyclic control rigging
Rolling Tendency - with a main rotor system in the counterclockwise direction, counteracting this causes the left skid to hang lower while hovering. The opposite is true when viewed from above, for rotor systems turning clockwise.
Pendular Action
Lateral or longitudinal oscillation of the fuselage in a hover, often caused by over control of pilot input.
Coning
The upward flexing of the rotor blades due to centrifugal forces and
lift.
Causes:
Low Rotor RPM
Greater Lift
Long Rotor Blades
High-G Maneuvers (High Load)
High Disk Loading
Coriolis Effect
Law of Conservation of Angular Momentum
It states that the value of angular momentum of a rotating body does not change unless an external force is applied.
Angular momentum - the moment of inertia (mass times distance from the center of rotation squared) multiplied by the speed of rotation.
The Coriolis effect is when the rotor blades speed up or slow down as the center of gravity moves closer or further away, respectively, from the axis of rotation.
Ground Effect
GROUND EFFECT: IGE
This occurs when a helicopter is hovering close to the ground, typically within a rotor diameter's distance (approximately one rotor length or less from the surface).
The proximity to the ground increases air pressure beneath the rotor blades, creating a cushion of air that enhances lift efficiency.
Pilots experience reduced power requirements and improved lift because the rotor system is more efficient
GROUND EFFECT: OGE
This occurs when a helicopter is hovering at a height greater than one rotor diameter from the ground.
There is no air cushion to assist with lift, so the rotor system has to work harder to maintain hover.
Pilots need more power to hover out of of ground effect due to decreased lift efficiency and higher drag.
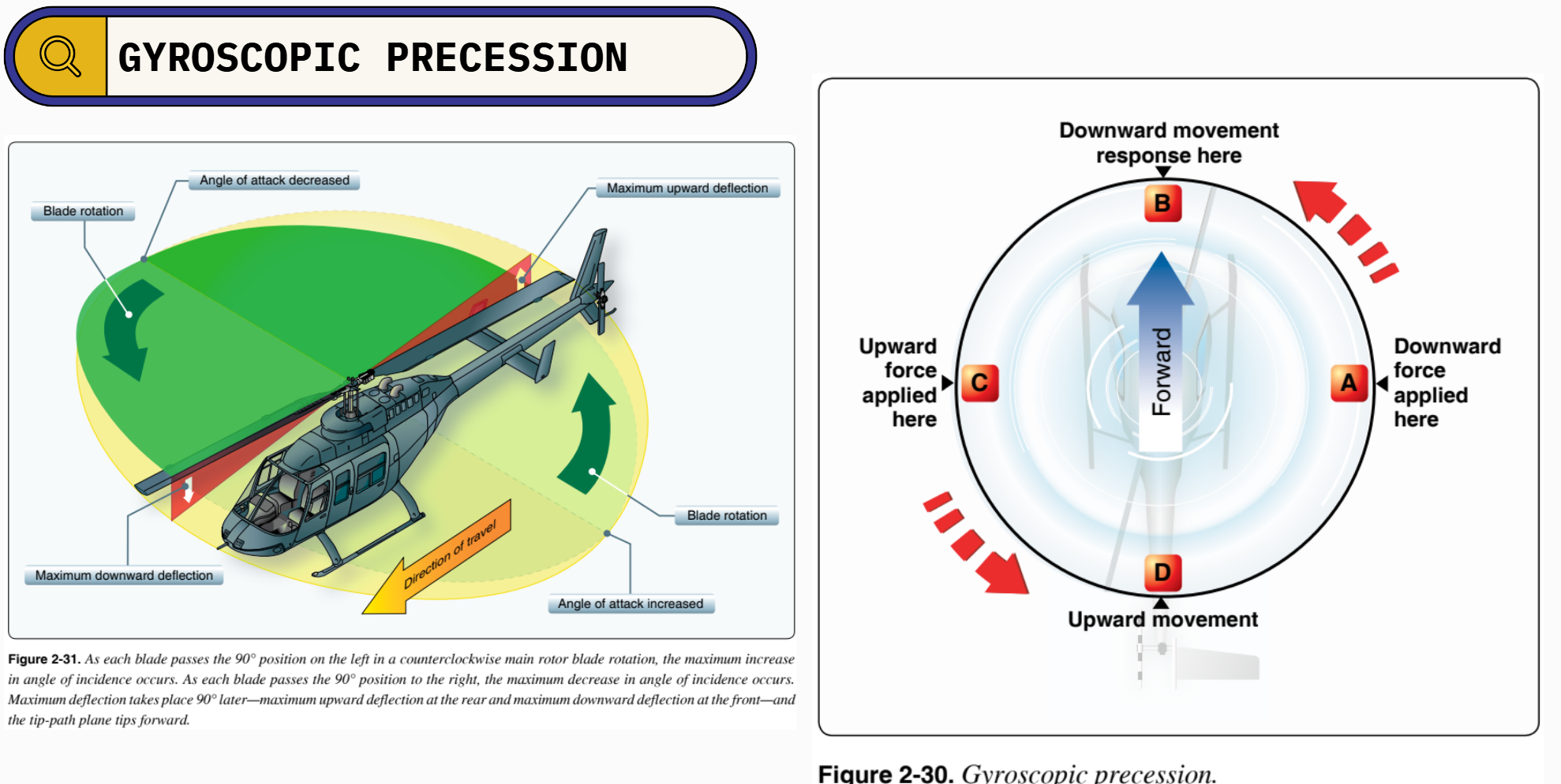
Gyroscopic Precession
Vertical Flight
In a no wind condition:
Vertical Ascent - lift and thrust are greater than weight and drag.
Vertical Descent - lift and thrust are less than weight and drag.
Forward Flight
rotor tilts forward; blades get more pitch on way toward tail
ADVANCING BLADE
As the relative wind speed of the advancing blade increases, the blade gains lift and begins to flap up.
It reaches its maximum upflap velocity at the 3 o'clock position, where the wind velocity is the greatest.
This upflap creates a downward flow of air and has the same effect as increasing the induced flow velocity by imposing a downward vertical velocity vector to the relative wind which decreases the AOA.
RETREATING BLADE
As relative wind speed of the retreating blade decreases, the blade loses lift and begins to flap down.
It reaches its maximum downflap velocity at the 9 o'clock position, where wind velocity is the least.
This downflap creates an upward flow of air and has the same effect as decreasing the induced flow velocity by imposing an upward velocity vertical vector to the relative wind which increases the AOA.
RETREATING BLADE STALL
A stall that begins at or near the tip of a retreating blade in a helicopter because of:
High Forward Airspeed
High Blade Loading (high gross weight)
High Load Factor (Steep Turns or Maneuvers)
Low Rotor RPM
High Density Altitude
Turbulence or Gusty Conditions
Major warnings of approaching retreating blade stall conditions:
Abnormal vibration
Pitch up of the nose
Rolling tendency toward the retreating blade side
Pilots can avoid this by not exceeding the never- exceed speed. This speed is designated VNE and is indicated on a placard and marked on the airspeed indicator by a red line.
Prevent blade stall by:
Reducing power (collective pitch)
Reducing airspeed
Reducing "G" loads during manuevering Maintain appropriate rotor RPM
Checking pedal trim
Fly conservatively in high-density altitudes and under heavy gross weight conditions.
Dissymmetry of Lift
It is the differential (unequal) lift between advancing and retreating halves of the rotor disk caused by the different wind flow velocity across each half. This difference in lift would cause the helicopter to be uncontrollable in any situation other than hovering in a calm wind.
The helicopter compensates for this using blade flapping or cyclic pitch control to balance the lift
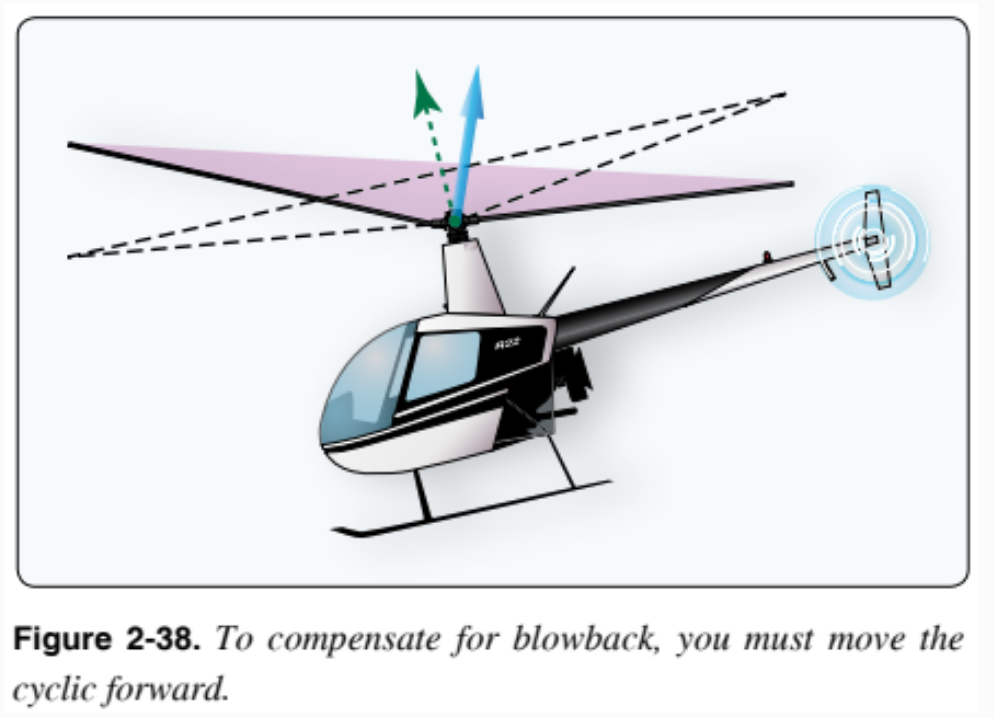
BLOWBACK
The tendency of the nose to rise or pitch up caused by the combined effects of dissymmetry of lift and transverse flow.
To correct for this tendency, the pilot must continuously move the cyclic forward as velocity of the helicopter increases until the takeoff is complete, and the helicopter has transitioned into forward flight.
Translational Lift
An aerodynamic experienced by phenomenon helicopters, especially during the transition from hover to forward flight or any lateral motion.
It occurs as the helicopter moves out of its own rotor downwash, allowing the rotor system to operate in cleaner, undisturbed air. This results in more efficient rotor blade performance and increased lift without requiring additional power.
EFFECTIVE TRANSLATIONAL LIFT (ETL)
The additional lift available at 16 to 24 knots, which makes the rotor disk operate more efficiently. This increased efficiency continues with increased airspeed until the best climb airspeed is reached, and total drag is at its lowest point.
Once the helicopter is transitioning through ETL, the pilot needs to apply forward and left lateral cyclic input to maintain a constant rotor-disk attitude.
Translational Thrust
It refers to the increased efficiency and thrust produced by a helicopter's tail rotor as it moves from a hover into forward flight.
In a hover, the disturbed air reduces the tail rotor's efficiency, requiring more power to produce enough thrust to stabilize the helicopter's yaw.
Transitioning into forward flight, the tail rotor begins moving into undisturbed air or "cleaner" airflow, which increases the efficiency of the tail rotor.
This improved efficiency produces more antitorque thrust, causing the nose of the aircraft to yaw left (with a main rotor turning counterclockwise) and forces the pilot to apply right pedal (decreasing the AOA in the tail rotor blades) in response.
In addition, during this period, the airflow affects the horizontal components of the stabilizer found on most helicopters which tends to bring the nose of the helicopter to a more level attitude.
Transverse Flow Effect
It refers to the difference in airflow and lift between the forward and rear portions of the rotor disc. This effect is most noticeable during the transition from hover to forward flight or during deceleration.
It causes a right roll and nose-down pitching tendency as it accelerates through approximately 20 knots or if the headwind is approximately 20 knots.
It is recognized by increased vibrations of the helicopter at airspeeds around 12 to 15 knots and can be produced by forward flight or from the wind while in a hover. This vibration happens at an airspeed just below ETL on takeoff and after ETL during landing.
The vibration happens close to the same airspeed as ETL because that is when the greatest lift differential exists between the front and rear portions of the rotor system.
To counteract transverse flow effect, a left cyclic input may be needed.
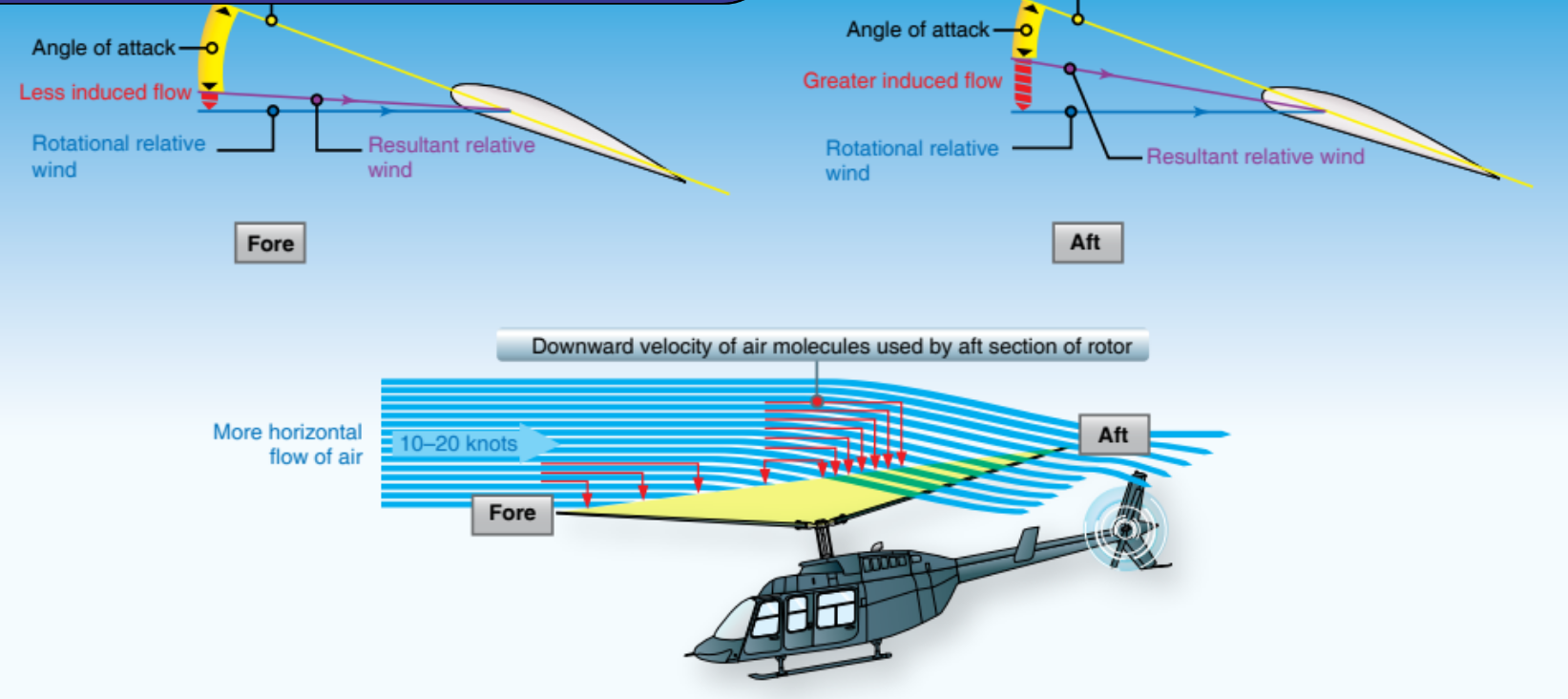
Induced Flow
Figure 2-21. A helicopter in forward flight, or hovering with a headwind or crosswind, has more molecules of air entering the aft portion of the rotor disk. Therefore, at the rear of the rotor disk, the angle of attack is less and the induced flow is greater.
Rearward Flight
backward
rotor tilts backward.
blades get more pitch on way toward nose
Hazards:
position of the horizontal stabilizer
skid design
Sideward Flight
sideways
rotor tilts toward direction of travel;
blades get more pitch on way toward side opposite direction of travel
Turning Flight
turn
helicopter hovers.
pitch of tail rotor blades swings craft
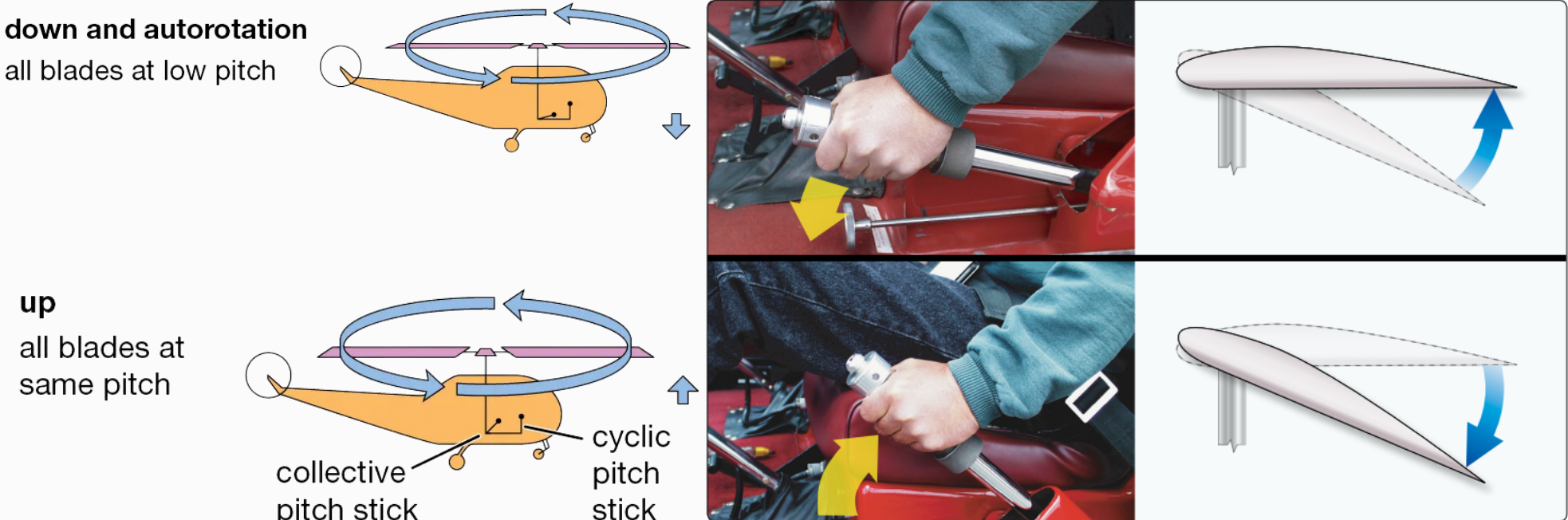
Unpowered Flight - Autorotation
It is the state of flight in which the main rotor system is driven by aerodynamic forces rather This occurs during an than engine power. unpowered descent, allowing the helicopter to land safely.
autorotation - all blades at low pitch
A straight-in autorotation implies an autorotation from altitude with no turns. The speed at touchdown and the resulting ground run depends on the rate and amount of flare.
Figure 2-46. During an autorotation, the upward flow of relative wind permits the main rotor blades to rotate at their normal speed. In effect, the blades are “gliding” in their rotational plane.
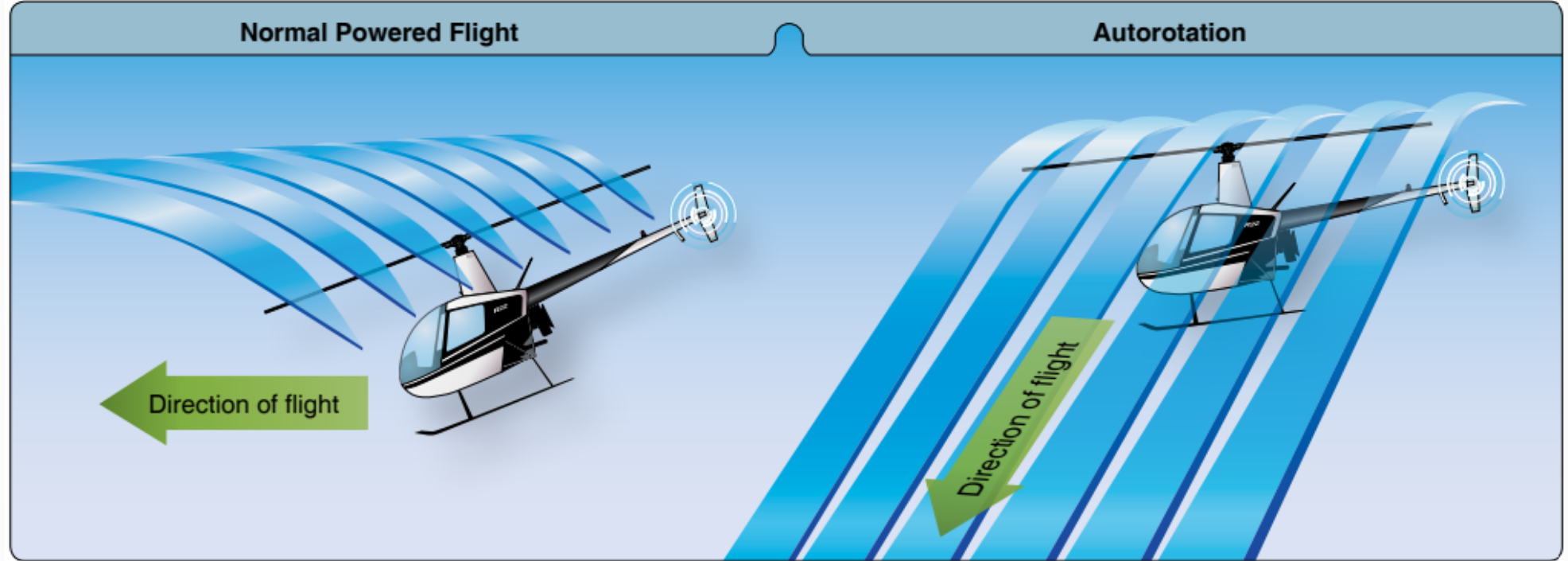
Autorotation is permitted mechanically by a freewheeling unit, which is a special clutch mechanism that allows the main rotor to continue turning even if the engine is not running.
Vertical Autorotation
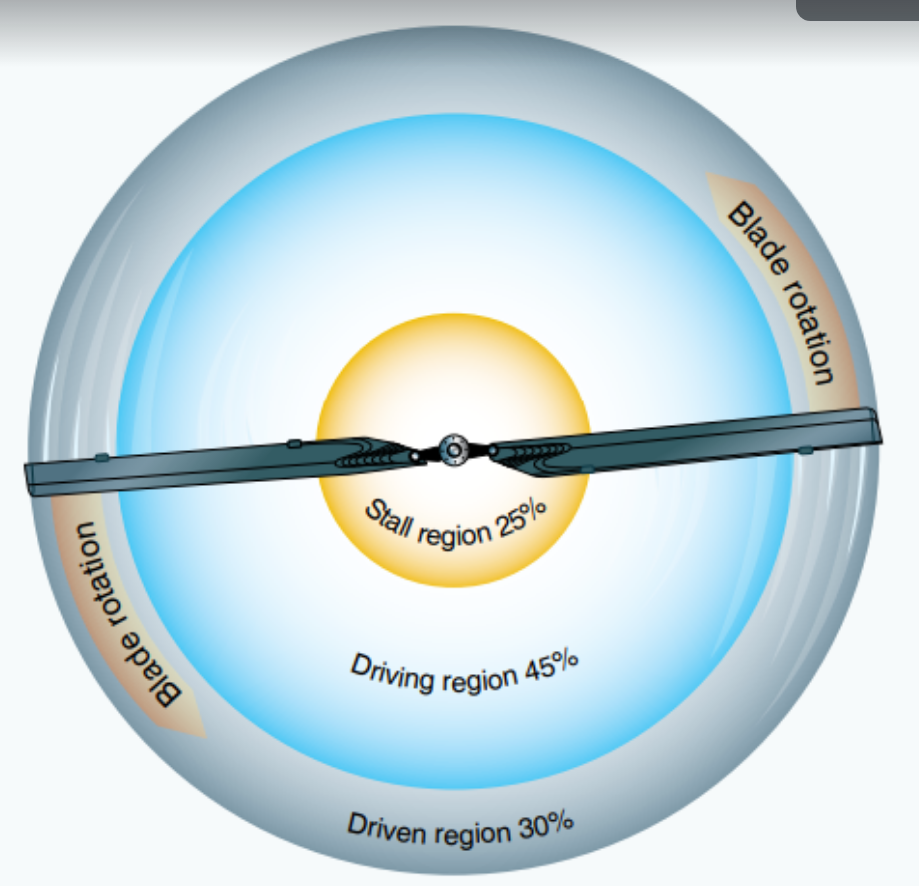
Driven Region / Propeller Region
Nearest the blade tips (about 30% of the rotor radius)
In this region, the airflow is moving faster than the blade, creating a drag force that helps turn the rotor.
Driving Region / Autorotative Region
between 25% to 70% of the blade radius.
The airflow speed is about equal to the blade speed, producing lift that helps turn the rotor.
Stall Region
Near the blade roots(25% of the rotor blade)
Operates above its maximum AOA (stall angle), causing drag, which tends to slow rotation of the blade.
AUTOROTATION (FORWARD FLIGHT)
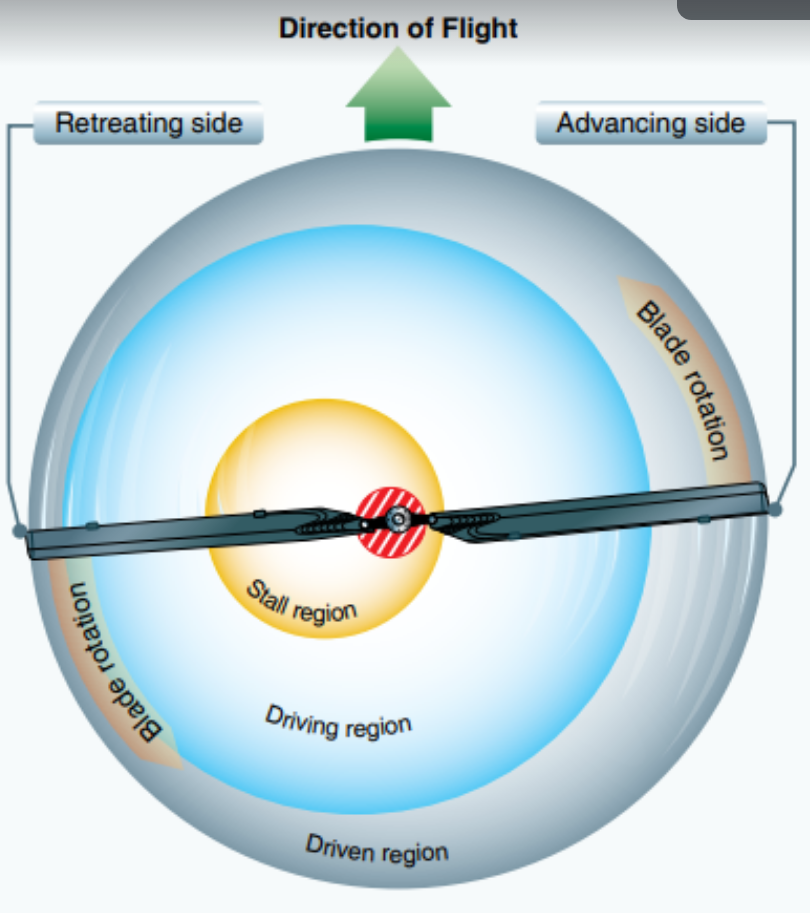
Since forward speed changes the inflow of air up through the rotor disk, all three regions move outboard along the blade span on the retreating side of the disk where AOA is larger.
With lower AOA on the advancing side blade, more of the blade falls in the driven region. On the retreating side, more of the blade is in the stall region.
A small section near the root experiences a reversed flow; therefore, the size of the driven region on the retreating side is reduced.
Prior to landing from an autorotative descent (or autorotation), the pilot must flare the helicopter in order to decelerate.
The pilot initiates the flare by applying aft cyclic. As the helicopter flares back, the airflow patterns change around the blades causing the rpm to increase.
Pilots must adjust the collective as necessary to keep the rpm within operating limits
Momentum Theory in Forward Flight
The rotor is modeled as an infinitely thin disc /momentum disk/actuator disk, which adds a momentum and energy to the flow.
Incompressible flow
Steady, inviscid, irrotational flow
One-dimensional and uniform flow
No swirl in the wake
HOVER/ AXIAL FLIGHT
AXIAL CLIMB
AXIAL DESCENT
POWER REQUIRED