W4: Binocular Vision 2
Binocular Vision Notes
Learning Objectives
Understand three aspects of Binocular Vision (BV):
The Horopter
Panum’s Fusional Area
Stereopsis
Observations About Two Eyes
Binocular Disparity: Differences in image location on the retinae due to horizontal separation of the eyes.
Fixated objects perceived as single images despite different vantage points from each eye due to the fovea’s having the same perceived visual direction.
The Horopter
Definition: for a finite fixation distance, a larger number of potential object locations are imaged on corresponding retinal points, whose locations can be imaged to a horizontal and vertical line that pass through the intersection of the lines of sight.
“A locus of points in space which are seen singly OR which make the same angle at the eyes”
Most common definition: “The locus of points in space whose image fall in corresponding points of the retinae, for a given altitude of the eyes.”
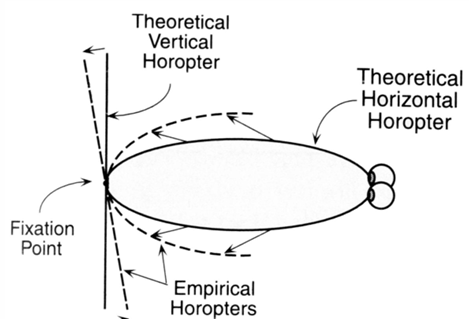
Types of Horopter:
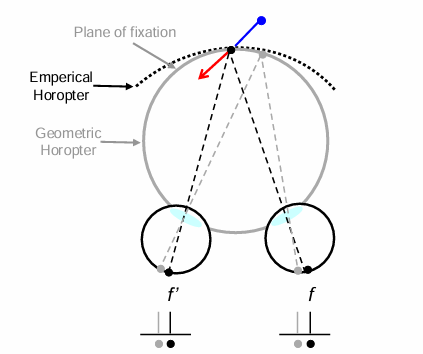
Geometric (Theoretical Vieth-Müller) Horopter: Points that project to corresponding points on the retina, appear at the same depth as the fixation point.
If corresponding points symmetrically distribute about the foveas, the points in space in the fixation plane, lie on a circle that passes through the nodal point of the two eyes and the fixation point.
usually assumed that corresponding points in the retina are isomorphic (have the same x, y retinal coordinates)
Empirical Horopter: All points in image exactly appear to lie at the same depth as the point of fixation. Typically flatter than geometric horopter. Deviations include:
Hering–Hillebrand deviation (horizontal)
Helmholtz deviation (vertical)
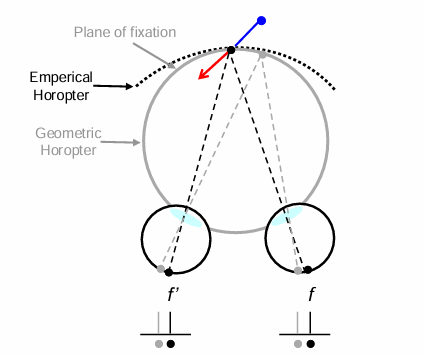
Move a fixed distance along grey circle, projections of new point in the two eyes move by exactly the same distance on each retina: known as Corresponding points.
Horopter Criteria
The horopter is a locus of points in space, that when the eyes steadily fixate a given point, fulfil certain criteria:
Primary subjective visual direction of each of the points is identical for both eyes
The points lie in a fronto-parallel plane that includes the point of fixation
mapping of locations in space that appear to lie in a plane parallel to the observer's forehead
The points lie on the centre of a region of single binocular vision
Stereoscopic sensitivity to changes in the position of the points is a maximum
None of the points provides a stimulus for fusional movement of the eye
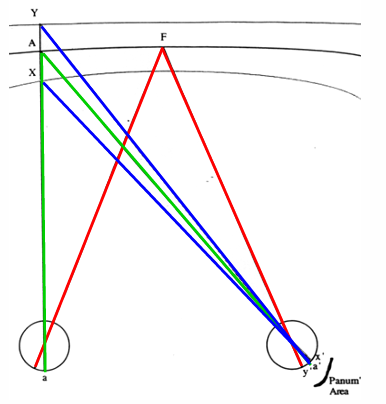
Corresponding points and Binocular disparity
Move a fixed distance along grey circle, projections of new point in the two eyes move by exactly the same distance on each retina: known as Corresponding points.
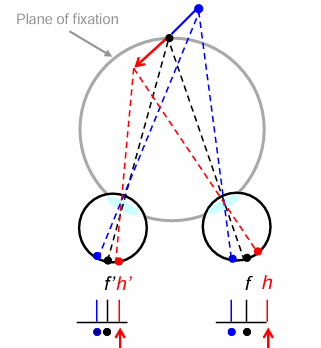
Binocular Disparity: Objects not within the plane of fixation (different distances from the observer) cause disparate retinal projections, affecting how depth is perceived.
retinal distance from f to h on right retina is not equal to the distance f’ to h’ on left retina. This difference is the binocular disparity.
If disparity is within sensory fusion limits, stereopsis occurs; outside of it, double vision is experienced.
Measuring Horopters
Common Visual Directions (Nonius, Vernier): Methods used to evaluate alignment or position of points in visual space, allowing assessment of binocular perception.
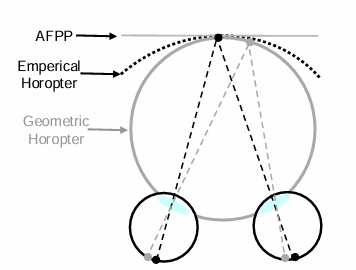
Apparent Frontoparallel Plane (AFPP): Locations in space that the observer perceives to lie in a plane parallel to their forehead and entrance pupils.
Centre of Region of Single Vision: The midpoint within Panum’s fusional area where single vision is achieved.
Region of Maximum Stereoscopic Acuity: Area where the ability to perceive depth through binocular disparity is at its highest.
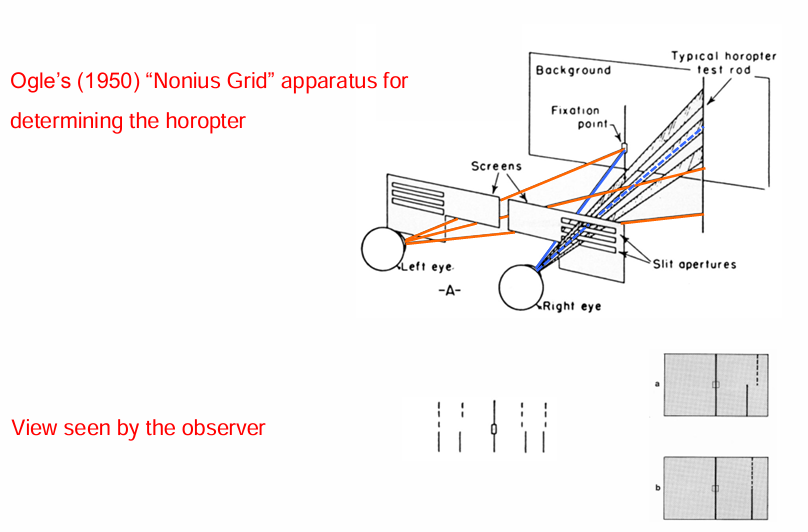
Defining the Horopter using common visual directions
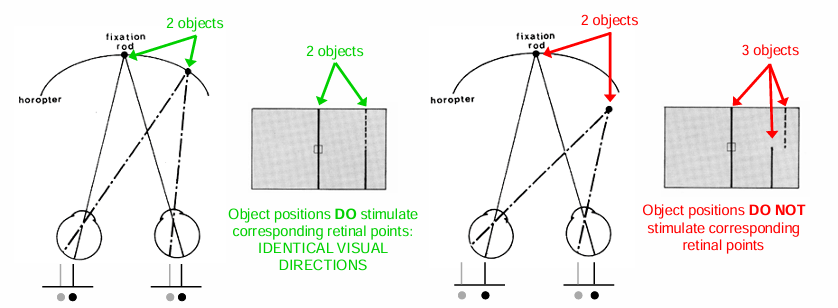
The Nonius method relies on the concept that corresponding retinal points generate identical visual directions.
If an object stimulates pair corresponding retinal points, its position can be determined when each eye perceives a different part of the object.
When two parts of the object are seen in the same direction, it indicates that they are positioned to stimulate corresponding points on the retina.
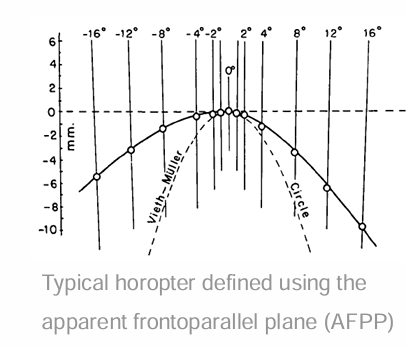
Defining the Horopter Using Apparent Frontoparallel Plane (AFPP)
AFPP Method Definition: In the apparent frontoparallel plane (AFPP) method, the horopter is estimated by arranging a series of test objects (rods) that includes the fixation point such that there is no depth difference between the objects.
Deviation from Geometric Horopter: The curve describing the AFPP deviates a bit farther from the geometric (Vieth-Müller) horopter compared to the curve determined by the Nonius method.
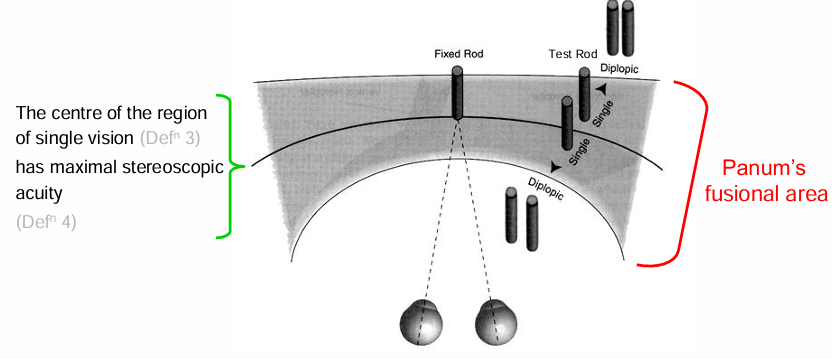
Best Rod Method for Determining the Region of Single Vision
Haplopic Method: This method assesses the region of single vision by using a fixed rod.
The observer fixates on the central rod (bifoveal fixation) while a peripheral test rod is adjusted inward or outward.
The position where the peripheral rod appears as two distinct images indicates the limits of the region of single vision.
the range in which the rod appears single represents Panum’s fusional area.
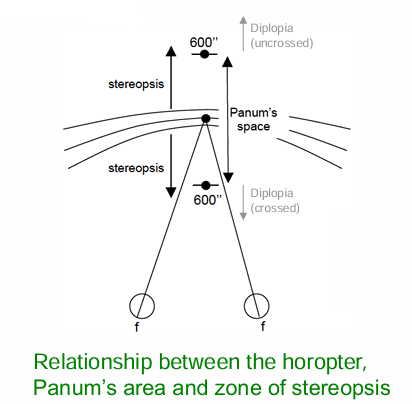
The Horopter in the Vertical Plane
Theoretical Horopter: A straight line that is perpendicular to the line of sight and passes through the fixation point.
Empirical Horopter:
Represented as a dashed line, it is slanted backward in depth by approximately 2°.
Crossed disparity is experienced below fixation, while uncrossed disparity is experienced above fixation.
The tilt decreases as the fixation point comes closer.
Consequence of the Tilt: Plane surfaces may appear tilted upwards due to the empirical horopter's backward slant in the vertical plane
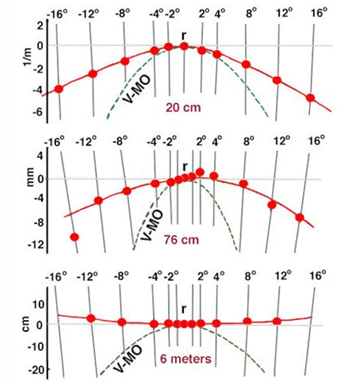
Factors that alter the Horopter
fixation distance: AFPP curves more as viewing distance decreases
the horopter becomes flatter when approaching the abathic distance (6m)
for fixation distances > abathic distance, the horopter becomes a convex parabola.
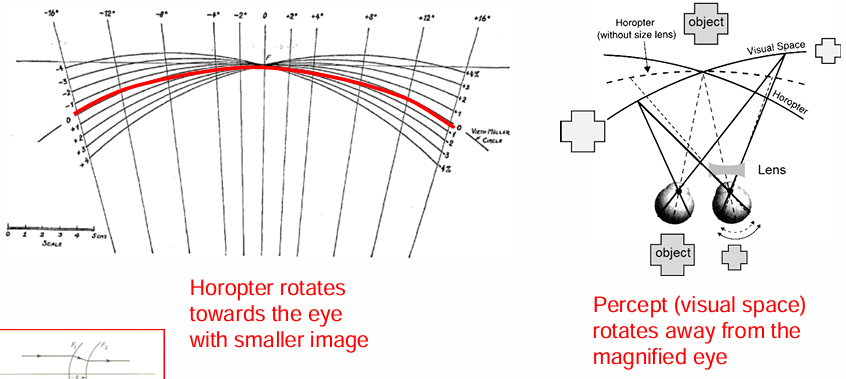
Aniseikonia (2 different image sizes on retina): tilted horopter
rotation of the horopter around fixation point.
the greater the magnification difference, the greater the tilting.
Asymmetric convergence: near fixation
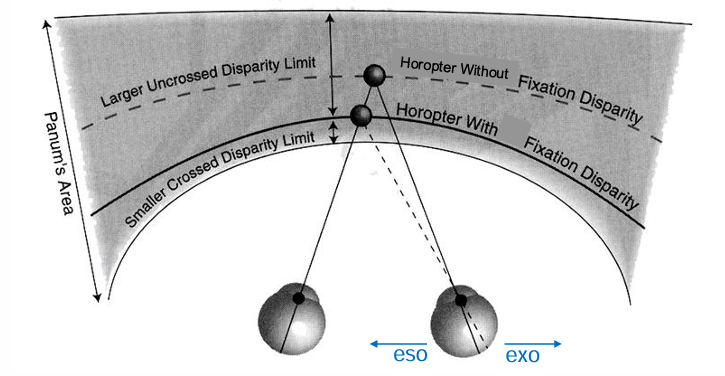
fixation disparity: shifts horopter forward or back
vergence errors cause retinal disparity and displace the horopter so that its no longer in the centre of Panum’s area.
fixation disparity decreases the width of the fusional range on one side of the horopter.
Panum’s Fusional Area
Definition: Region where binocular images are fused into a single perception.
Disparity types:
Crossed Disparity: Objects in front of the horopter.
Uncrossed Disparity: Objects behind the horopter.
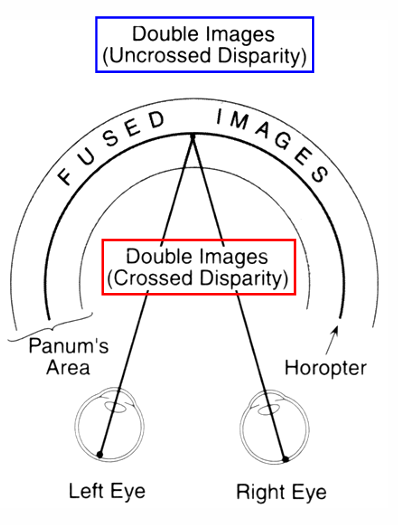
Images on the horopter stimulate corresponding retinal points
axons from these points will project to the same cell in cortex giving rise to single vision
objects in front or behind the horopter within Panum’s region fall on slightly disparate retinal points, giving rise to a depth percept.
objects outside Panum’s region produce images on grossly disparate points. No binocular interaction in the cortex, object is perceived as double
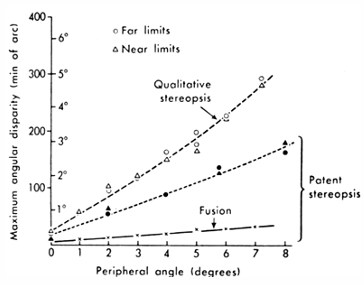
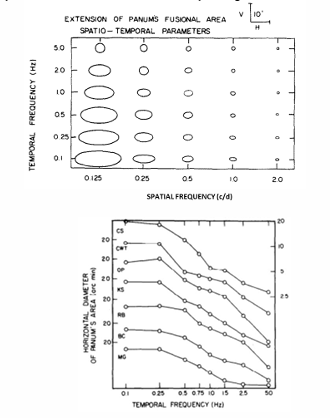
Spatio-Temporal limits of Panum’s Area
disparity magnitude: binocular fusion breaks.
In peripheral retina, a larger disparity (30-40’ arc at 12 degrees) is required to see depth compared to fovea (16-15’ arc)
angular disparity required to see depth varies with target size - larger for larger targets.
larger for low spatial frequency targets and slow temporal modulation disparity
Stereopsis and Depth Perception
Stereopsis: Depth perception derived from binocular disparity.
Minimum disparity (stereothreshold) exists below which no depth perception occurs.
The brain compares neural signals from each retina for depth calculations; this occurs first in area V1.
cortical neurons for stereopsis are sensitive to specific differences between the receptive fields in the two eyes.
Importance to survival: Enhances signal-noise ratio (by 1.14x) and is critical for low-light visual conditions and deciphering camouflage.
Characteristics of Stereopsis:
If features fall within a limited range (<0.5° at the fovea), they will be perceived as a single fused image with depth offset. Beyond this range (Panum’s fusional area), objects will appear double.
Objects with larger disparities are perceived at increasing depths, even beyond the limits of fusion (e.g., buildings), because multiple corresponding retinal points exist, and Panum’s area summates information across the visual field.
Binocular disparity resulting from a depth difference varies with viewing distances.
At very close viewing distances, a depth difference of 25 μm can be discriminated, while at larger distances (e.g., 100m), the resolution decreases to 4m.
Stereoacuity
definition: ability to judge small differences in depth.
under optimal conditions, disparities as small as 2 sec of arc can be detected
0.05mm at 50cm and4mm at 5m.
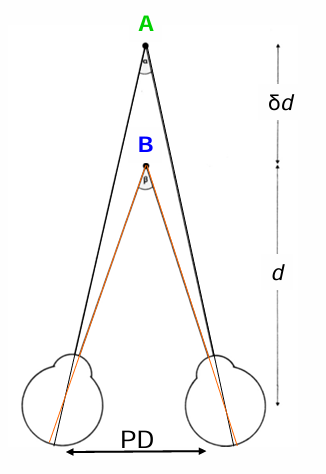
stereo-threshold: smallest distance δd, at which A can be distinguished behind B, for the given distance, d.
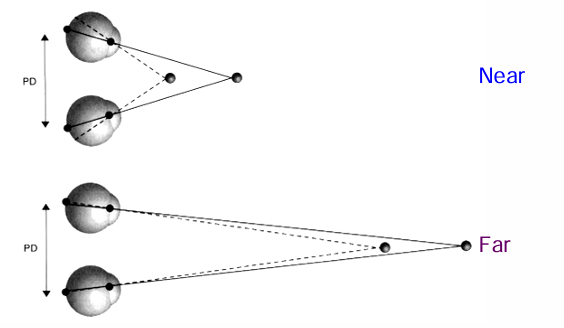
Fixation Distance
Near: At near fixation distances, even small differences in the distance between two targets produce large and easily noticeable differences in the retinal positions of their images, known as binocular disparity.
Far: At far distances, even a large separation between targets results in a small, possibly subthreshold, binocular disparity, making depth perception less pronounced.
Beyond 800m to 1,300m, stereopsis can no longer be appreciated.
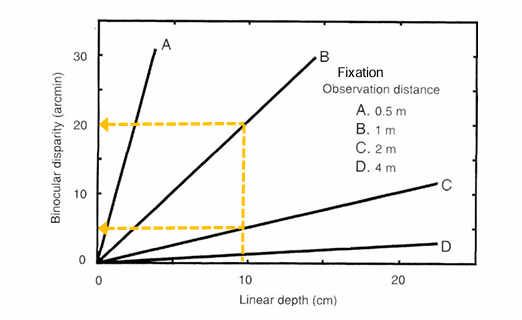
Effect of Fixation Distance on Stereoacuity
At any fixation distance (A, B, C, or D), there is a linear relationship between the distance between objects (linear depth) and binocular disparity.
The binocular disparity produced by an object (with the same linear depth) is greater at shorter viewing distances (e.g., B compared to C, as indicated by the orange line).
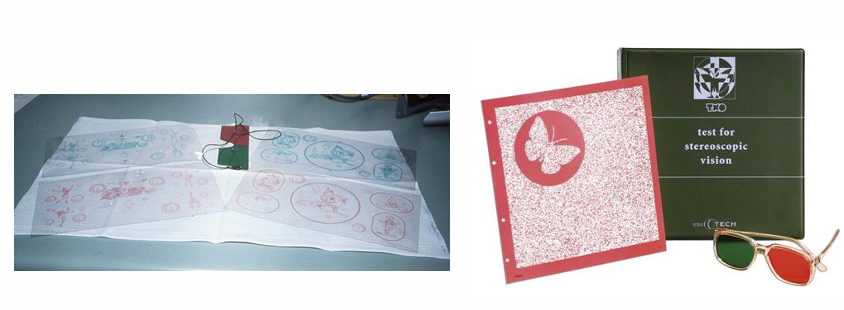
Clinical Tests of Stereoscopic Acuity
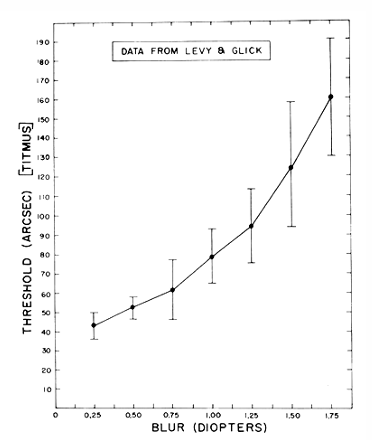
Factors Affecting Stereoacuity
Retinal Image Quality: Stereoacuity is reduced by various factors affecting the retinal image quality in one or both eyes:
Optical Defocus: Especially significant if unilateral.
Monocular Cataracts: Impair clarity in one eye.
Pulfrich Phenomena: Lateral motion interpreted to have depth due to differences in timing of signal transmission between the two eyes caused by reduced illumination.
Amblyopia: Reduced vision in an eye that did not develop normal vision.
Anisometropia: Presence of unequal refractive power in the two eyes (≥1D, VA ≤6/12 in the worse eye).
Strabismus: Misalignment of the two eyes, affecting coordinated movement and focus.
Clinical Screening Tests
Clinical tests are available to determine if normal binocular vision is present. These tests utilize various principles, including:
Coloured 3D Anaglyphs
Random Dot Stereograms
Polarised Light Tests
TNO & Randot Stereograms
Anaglyph 3D Images: These are chromatically opposite (e.g., red-green) stereo pairs that are simultaneously imaged from slightly different perspectives and viewed through coloured filters (glasses) to create disparity.
Stereograms: Use random dot pairs that produce a depth sensation when fused. They are particularly suitable for small children (ages 2.5 to 5 years) as they provide no monocular cues and can detect depth differences as small as 15 seconds of arc
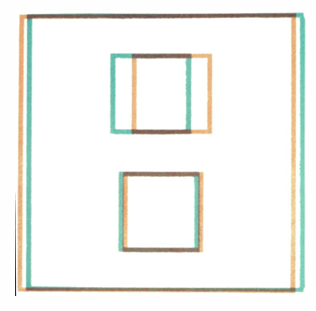
size of the disparity shift determines the amount of perceived depth
upper square appears to protrude more and produce a larger image shift
lower square which protrudes less and produces a smaller image shift.
Stereo-tests using polarised light
no monocular cues
stereoacuity b/w 4800 and 20 secs of arc.
well suited for non-readers, children and adults.

Stereo-tests using real depth
frisby stereotest
stereoacuity b/w 600 and 20 secs of arc.
suitable for non-readers, children and adults
affected by monocular cues.

Factors Affecting Stereoscopic Acuity
Monocular and Binocular Defocus: Uncorrected refractive errors degrade stereoacuity in proportion to the magnitude of the defocus. Greater impact from unilateral vs. bilateral defocus.
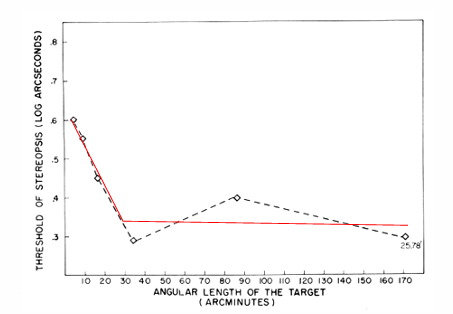
Object Size: Improved stereoacuity when the length of the stimuli increases to >20-30 min of arc. Stereoacuity is reduced when the difference in image sizes (aniseikonia) on the two retina are >2%
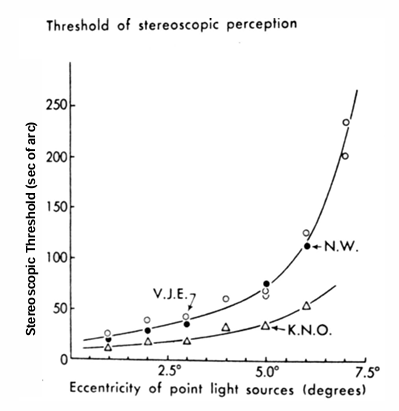
Retinal Eccentricity: Stereoacuity decreases with increasing distance from the fovea (eccentricity).
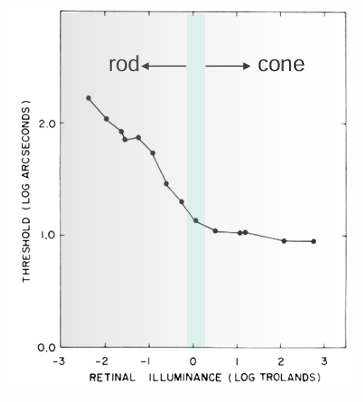
Luminance and Illumination: Stereoacuity increases with increasing retinal illuminance (as vision transitions from rod to cone vision)
depth perception is reduced when the retinal illumination is different for the two eyes (Pulfrich phenomenon)
Stereoacuity decreases at low contrasts & the effect is greater for asymmetric reductions (i.e., cataract).
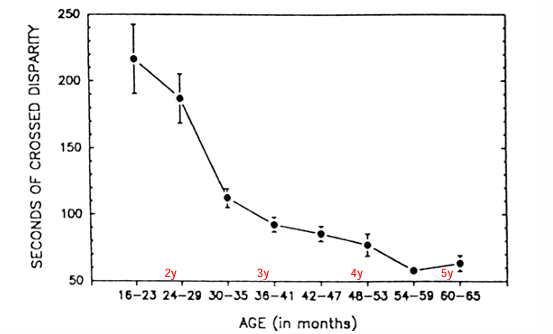
age: stereoacuity improves with increasing age up to 4 yrs. In 60-69 year olds, only 37% have normal stereoacuity.
in persons aged 70-79 years, only 25% have normal stereoacuity
Questions to Consider
How does the horopter change with fixation depth?
What are four methods for horopter measurement?
How do image size differences affect the horopter?
What happens at the limits of Panum’s area?
How do lighting conditions influence stereoacuity?
What is the link between depth intervals and disparity in various contexts?